VINS-Mono代码注释 by Hansry
VINS是一种具有鲁棒性和通用性的单目视觉惯性状态估计器。
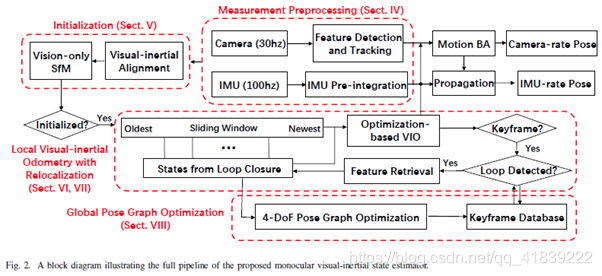
该算法主要有以下几个模块:
- 预处理
1)图像特征光流跟踪
2)IMU数据预积分 - 初始化
1)纯视觉Sfm
2)Sfm与IMU预积分的松耦合 - 基于滑动窗口的非线性优化
- 回环检测与重定位
- 四自由度位姿图优化
1、ar_demo:一个ar应用demo
2、benchmark_publisher:接收并发布数据集的基准值
3、camera_model
calib:相机参数标定
camera_models:各种相机模型类
chessboard:检测棋盘格
gpl
sparse_graph
intrinsic_calib.cc:相机标定模块main函数
4、config:系统配置文件存放处
5、feature_trackers:
feature_tracker_node.cpp ROS 节点函数,回调函数
feature_tracker.cpp 图像特征光流跟踪
6、pose_graph:
keyframe.cpp 关键帧选取、描述子计算与匹配
pose_graph.cpp 位姿图的建立与图优化
pose_graph_node.cpp ROS 节点函数,回调函数,主线程
7、support_files:帮助文档、Bow字典、Brief模板文件
8、vins_estimator
factor:实现IMU、camera等残差模型
initial:系统初始化,外参标定,SFM
utility:相机可视化,四元数等数据转换
estimator.cpp:紧耦合的VIO状态估计器实现
estimator_node.cpp:ROS 节点函数,回调函数, 主线程
feature_manager.cpp:特征点管理,三角化,关键帧等
parameters.cpp:读取参数
主要参考了崔华坤的《VINS论文推导及代码解析》
1、IMU预积分:
VINS-Mono之IMU预积分,预积分误差、协方差及误差对状态量雅克比矩阵的递推方程的推导
VINS-Mono理论学习——IMU预积分 Pre-integration (Jacobian 协方差)
2、视觉IMU联合初始化:
VINS-Mono之外参标定和视觉IMU联合初始化
VINS-Mono理论学习——视觉惯性联合初始化与外参标定
3、后端非线性优化:
VINS-Mono之后端非线性优化
VINS-Mono理论学习——后端非线性优化
4、边缘化:
VSLAM之边缘化 Marginalization 和 FEJ (First Estimated Jocobian)
VINS-Mono关键知识点总结——边缘化marginalization理论和代码详解
5、回环检测与重定位:
vins-mono代码阅读之4自由度位姿图优化
VINS-Mono代码解读——回环检测与重定位 pose graph loop closing
参考VINS代码注释:
https://github.com/ManiiXu/VINS-Mono-Learning by ManiiXu