SPOT-IT 3D (Simultaneous Positioning, Observing, Tracking, Identifying Targets in 3D) is a project by Mechanical Engineering @ National University of Singapore. This project aims to develop a software that utilizes a multi-camera surveillance system for real-time multiple target tracking capabilities. This software capability is highly applicable for monitoring specific areas, and some use cases include monitoring airspaces, traffic junctions, etc.

-
Paper on trajectory-based target matching and re-identification between cameras:
- Niven Sie Jun Liang and Sutthiphong Srigrarom. "Multi-camera multi-target tracking systems with trajectory-based target matching and re-identification." In 2021 IEEE International Conference on Unmanned Aerial Systems (ICUAS), IEEE, Athens, Greece, 2021.
- Link to paper: (To be added into IEEE Xplore soon)
-
Paper on field test validations for using trajectory-based tracking with a multiple camera system for target tracking and 3-dimensional localization:
- Niven Sie Jun Liang, Sutthiphong Srigrarom and Sunan Huang. "Field test validations of vision-based multi-camera multi-drone tracking and 3D localizing, using concurrent camera pose estimation." In 2021 IEEE 6th International Conference on Control and Robotics Engineering (ICCRE), IEEE, Beijing, China, 2021.
- Link to paper: https://ieeexplore.ieee.org/abstract/document/9358454
-
Paper on state estimation filters and proposed use of implementing multiple state estimation filters in parrallel (Integrated Multiple Model):
- Sutthiphong Srigrarom, Niven Sie Jun Liang, Jiahe Yi, Kim Hoe Chew, Floorian Holzapfel, Henrik Hesse, Teng Hooi Chan and Jalvin Jiaxiang Chen. "Vision-based drones tracking using correlation filters and Linear Integrated Multiple Model." In 2021 IEEE International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), IEEE, Chiang Mai, Thailand, 2021.
- Link to paper: (To be added into IEEE Xplore soon)
-
Paper on integrated kinematic-based detection tracking estimation system for dynamic localization of small aerial vehicles:
- Sutthiphong Srigrarom, Shawndy Michael Lee, Mengda Lee, Foong Shaohui and Photchara Ratsamee. "An integrated vision-based detection-tracking-estimation system for dynamic localization of small aerial vehicles." In 2020 IEEE 5th International Conference on Control and Robotics Engineering (ICCRE), IEEE, Osaka, Japan, 2020.
- Link to paper: https://ieeexplore.ieee.org/abstract/document/9096259
-
Paper on binocular and stereo cameras for multiple drone detection and 3-dimensional localization:
- Yi, Jiahe, and Sutthiphong Srigrarom. "Near-Parallel Binocular-Like Camera Pair for Multi-Drone Detection and 3D Localization." In 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), pp. 204-210. IEEE, Shenzhen, China, 2020.
- Link to paper: https://ieeexplore.ieee.org/abstract/document/9305485
-
Paper on kinematics-based re-identification across multiple cameras using 2D and 3D motion-based methods:
- S. X. Seah, Y. H. Lau, and S. Srigrarom, “Multiple Aerial Targets Re-Identification by 2D- and 3D- Kinematics-Based Matching,” Journal of Imaging, vol. 8, no. 2, p. 26, Jan. 2022, doi: 10.3390/jimaging8020026.
- Link to paper: https://www.mdpi.com/2313-433X/8/2/26
This project aims to develop a methodology of identification, localization, and tracking of small and fast moving targets, such as flying drones, using an integrated multiple camera monitoring system. Our study focuses on using motion-based features to track targets, instead of traditional tracking algorithms that use appearance-based features by incorporating deep convolutional neural networks for target tracking.
As we focus on small and fast moving targets, such as drones, using appearance-based features in this specific case may be difficult, as these targets often appear as small black "dots/blobs" in video frames. This would specifically mean that we use targets’ trajectory features, such as the derivatives of displacement, heading and turning angle, to identify and track targets instead.
Thus, our software incorporates the use of a multiple camera surveillance system to track and localize these moving targets. We aim to be able to continuously track drones in monitored airspaces, re-identify these targets between the cameras, and montor their 3-dimensional coordinates when they are inside the monitored space.
SPOT-IT 3D can be thought of as being broadly comprising two main processes. They are the detection and tracking process, and the re-identification and trackplot process. The software is built entirely in C++ for high runtime performance capabilities.
The following is a general high-level overview of the main code pipeline:
-
Open and read from single / double camera sensors, and obtain live camera frames.
-
Compensate for environmental effects (e.g. bright sunlight, dark skies) that may affect detection of targets. This works by converting each frame to HSV and applying localised image enhancements to the S and V channels of the sky.
-
Apply background subtraction using OpenCV's MOG2 to remove noise in the background.
-
Apply either blob or contour detection to detect targets in the frame. Morphological operations such as erosion and dilation are used to remove noise and enhance detection.
-
Use of Kalman filtering (KF) and Discriminative Correlation Filter (DCF) as our state estimation techniques to predict our targets' next known location in the following frames. Both filters are implemented in our tracking pipeline, as these targets move at fast and erratic speeds, and using these filters allow us to better predict their positions for continuous tracking.
-
Implements the use of Hungarian / Munkre's algorithm to match our detections to tracks. The matching algorithm is based on a 2 dimensional cost matrix of tracks and detections, where the cost is computed by comparing every detection's euclidean distance away from each tracked target predicted location from our DCF and EKF filters.
-
The software has re-identification capabilities of targets between cameras. This would mean that every camera will be able to know that they are tracking the same target, purely based on their kinematic features. We implement cross-correlation matching of tracks' trajectory features, and obtain a 2-dimensional correlation score between the cameras' tracks.
-
Apply graph matching algorithm for geomentry-based identification using relative coordinates. The software initializes a complete bipartite graph, that calculates the maximum sum of the weights of the edges that span across the two disjoint groups of the complete bipartite graph. Three distinct methods are used to calculate a similarity score and serve as graph edge weights in our re-identification process.
-
Estimation of targets' location in 3-dimensional space using triangulation and stereo camera methodology. We use disparities between the two camera frames to obtain depth estimations of the tracked targets.
The following step-by-step processing will guide you on the installation process. Our software runs on a Linux environment, is heavily dependent on OpenCV 4.5.2 and above, and compiles using CMake.
-
Install Open CV and other dependencies
Make sure your sources are updated
sudo apt-get update sudo apt-get upgrade
Install dependencies
sudo apt-get install build-essential cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev sudo apt-get install python3.5-dev python3-numpy libtbb2 libtbb-dev sudo apt-get install libjpeg-dev libpng-dev libtiff5-dev libjasper-dev libdc1394-22-dev libeigen3-dev libtheora-dev libvorbis-dev libxvidcore-dev libx264-dev sphinx-common libtbb-dev yasm libfaac-dev libopencore-amrnb-dev libopencore-amrwb-dev libopenexr-dev libgstreamer-plugins-base1.0-dev libavutil-dev libavfilter-dev libavresample-dev sudo apt install curl && sudo apt-get install libcurl4-openssl-devNavigate to any folder of your choice and install Open CV (instructions have been modified from the OpenCV Installation Docs: https://docs.opencv.org/4.5.2/d7/d9f/tutorial_linux_install.html):
# Clone sources git clone https://github.com/opencv/opencv.git git clone https://github.com/opencv/opencv_contrib.git # Create build directory and switch into it mkdir opencv_build cd opencv_build # Configure; note that several flags are toggled for optimisation purposes (@TODO: Re-activate CUDA?) cmake -D BUILD_TIFF=ON -D WITH_CUDA=OFF -D ENABLE_AVX=OFF -D WITH_OPENGL=OFF -D WITH_OPENCL=OFF -D WITH_IPP=OFF -D WITH_TBB=ON -D BUILD_TBB=ON -D WITH_EIGEN=OFF -D WITH_V4L=ON -D WITH_VTK=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D CMAKE_BUILD_TYPE=RELEASE -D OPENCV_GENERATE_PKGCONFIG=YES -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=../opencv_contrib/modules ../opencv # Build make -j4 sudo make install sudo ldconfig
You can test whether OpenCV is successfully installed using the following command:
pkg-config --modversion opencv4
Only if you intend to run WSrt Edge Computing Software: Install the dependencies for the WSrt package as specified here.
-
Pull spot-it-3d repository from GitHub.
git clone https://github.com/seahhorse/spot-it-3d.git
-
Navigate to the spot-it-3d parameters file and open it with a text editor of choice.
nano spot-it-3d/include/multi_cam_params.hpp
-
Set the parameters as shown below to your specific setup.
- Set NUM_OF_CAMERAS_ to the number of cameras in your setup
- For non-realtime processing, set IS_REALTIME_ = false, This processes pre-recorded video files and is meant for research and debugging purposes. The format and location of these files are very specific.
- The location of these video files should be, relative to the location of this Readme file, placed in "data/input" folder. The code will only read pre-recorded inputs from this specific folder
- Video input files should be named in the format "<SESSION_NAME_>_<CAMERA_INPUT_>.<INPUT_FILE_EXTENSION_>".
- For example, if you are processing one avi video file originally called "A.avi", rename it as "A_0.avi". Then in the parameteres file, set "A" as your SESSION_NAME_, CAMERA_INPUT_ to {"0"}
- If you are processing two avi video files simultaneously (simulating two camera inputs), set the filenames to "A_0.avi", "A_1.avi", and set CAMERA_INPUT_ to {"0", "1"}
- For realtime processing with direct USB cameras, set IS_REALTIME_ = true. This is the usual operating scenario. Specify the camera port numbers directly in CAMERA_INPUT_. You may set SESSION_NAME_ and INPUT_FILE_EXTENSION to any string of your choice (it will be used as the name and file extension of the output files, which will be explained later)
- For example, if you have a single USB camera connected to /dev/video0, set CAMERA_INPUT_ = {"0"}
- If you have two USB cameras, one connected to /dev/video2 and another to /dev/video4, set CAMERA_INPUT_ = {"2", "4"}
- If you are unsure what is your camera port number, type
v4l2-ctl --list-devicesin a separate terminal to bring up the list of media devices connected to your computer.
- For realtime processing with vilota edge cameras, set the parameters as specified here.
- Set the video resolution parameters FRAME_WIDTH_ and FRAME_HEIGHT_ to the exact video resolution of the input video files (for non-realtime processing), or the desired video resolution of the camera inputs (for realtime processing)
- If you wish to run the Middleman Server code, refer to the initial configuration in the Middleman Readme
// declare session and camera parameters // for the SESSION_NAME_, it is recommended to follow this convention: "YYYY-DD-MM_<location>_<session no>" const std::string SESSION_NAME_ = "A" // name of output video file (and input video file for non-realtime processing) const std::vector<std::string> CAMERA_INPUT_ = {"0", "1"}; // input locations of cameras const std::string INPUT_FILE_EXTENSION_ = "avi"; // input video file extension for non-realtime processing const bool IS_REALTIME_ = false // true = realtime processing const int NUM_OF_CAMERAS_ = 2 // 1 for single camera processing, 2 for double camera processing; // declare video parameters const int FRAME_WIDTH_ = 1920; const int FRAME_HEIGHT_ = 1080;For a more detailed breakdown of the key parameters and how they affect the code, refer to (@TODO: Write new MD file on parameter breakdown).
Take special note that each camera is pre-built with a set of (resolution, fps) settings. To check all possible combinations, run:
v4l2-ctl -d /dev/video# --list-formats-ext
with # replaced with your camera device number.
Note that the code will write output video files to the following folder, relative to the location of this Readme file: "data/output". The following files will be output:
- <SESSION_NAME_>_annotated.<INPUT_FILE_EXTENSION_>: Contains the annotated videos with detection, tracking and re-identification across all cameras
- <SESSION_NAME_>_<CAMERA_INPUT_>.<INPUT_FILE_EXTENSION_>: Contains the un-annotated video recordings. Useful for realtime processing scenarios where the recording of the test is required for debugging or offline re-processing purposes
The code will also write the following log files to the "data/log" folder, if run successfully to completion:
- <SESSION_NAME_>_targets-2d-out,json: Contains 2D coordinates of all tracks across all cameras
- <SESSION_NAME_>_target-3d-out.json: Contains estimated 3D coordinates of all re-identified targets. This is relevant only for setups with 2 or more camera inputs
- <SESSION_NAME_>_frame-time.csv: Contains processing time taken for each frame, for debug purposes
It is recommended to clear these output files when they are no longer needed to avoid buildup of junk files.
-
Run the CMake compile script. It should compile the code, generate the executable and automatically run it.
bash compile_cmake.sh
-
The compile scripts generate an executable named "spot-it-3d" in the root folder of this repository and should be automatically launched by the script above. In the event the executable is not launched or you need to rerun it, run the executable directly to run the program:
./spot-it-3d
-
Navigate to the Windows Store and install WSL2 (Windows Subsystem for Linux 2). Detailed instructions can be found at https://docs.microsoft.com/en-us/windows/wsl/install-win10.
-
Download and install XMing X Server for Windows. Detailed instructions can be found at http://www.straightrunning.com/XmingNotes/.
-
Launch XLaunch and select the following settings:
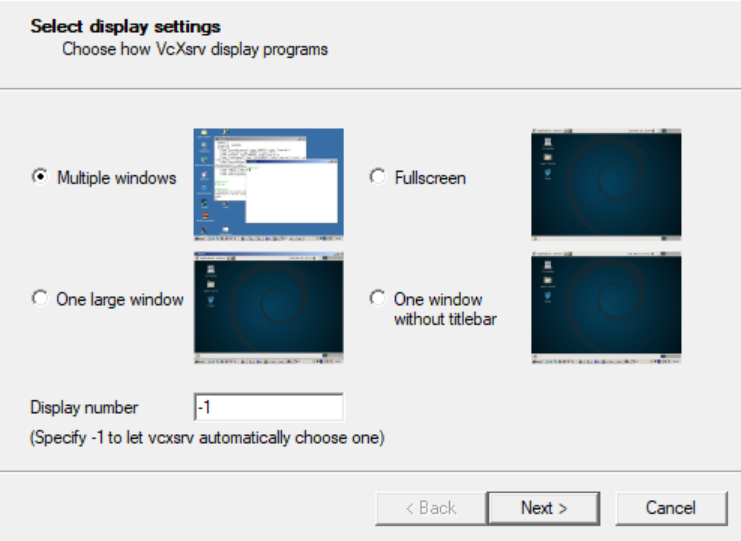
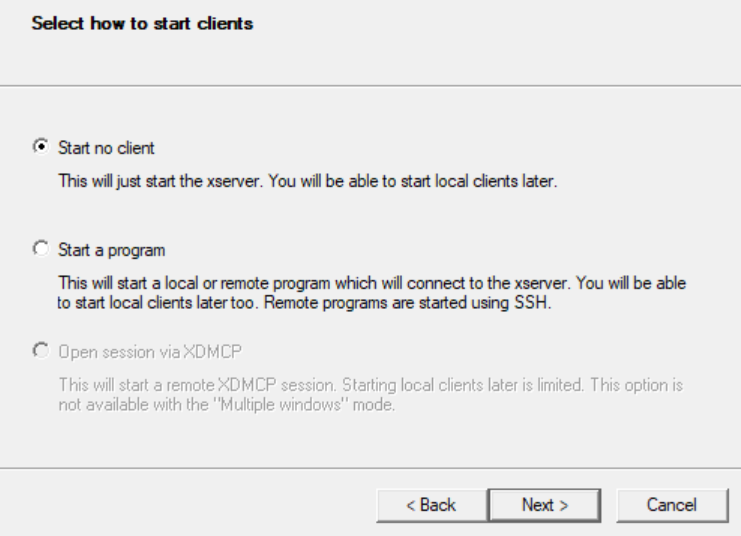
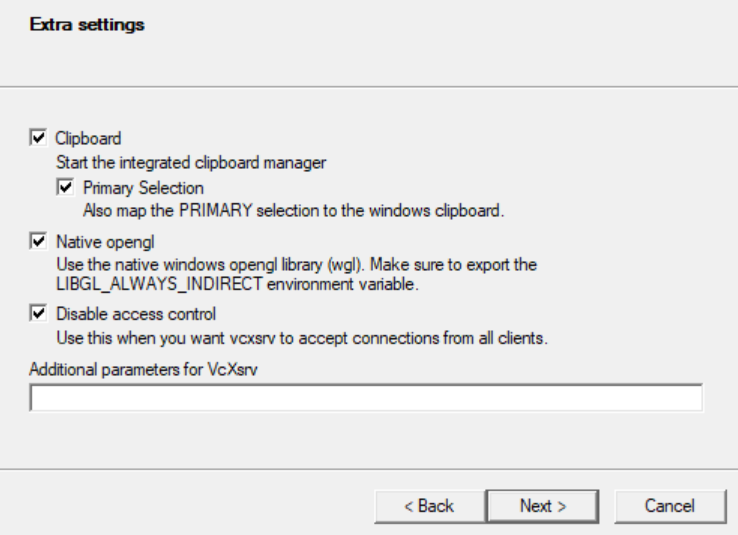
For ease of starting up in subsequent runs, you may wish to save these settings by clicking on the Save Configuration button.
If the client was launched successfully, you should see a mini-icon in the sidebar at the bottom right-hand corner of your screen.
-
Open up a WSL2 terminal and follow the instructions in 6.1 Linux-based Operating Systems.



We would like to thank the lead researcher in this project, Dr. Sutthiphong Srigrarom, for his continuous guidance and supervision with the development of this project. We would also like to acknowledge the hard work the team in playing a part in developing this software. Our research team comprises:
- Dr. Sutthiphong Srigrarom (email: spot.srigrarom@nus.edu.sg, GitHub profile: https://github.com/spotkrub)
- Niven Sie Jun Liang (email: sieniven@gmail.com, GitHub profile: https://github.com/sieniven)
- Seah Shao Xuan (email: shaoxuan.seah@gmail.com, GitHub profile: https://github.com/seahhorse)
- Lau Yan Han (email: sps08.lauyanhan@gmail.com, GitHub profile: https://github.com/disgruntled-patzer)
- Kieren Chua (email: kieren.chua23@gmail.com, Github profile: https://github.com/YeOldMan23)