using symbolic math package in Python - SymPy - to calculate forward and inverse kinematics with defined dh tables, see 1.1Kinematics_SymPy_DH.ipynb
- matlab code is also available in the repository, but requires symbolic math toolbox
- self-defined dual quaternion class to transfer dh table to dual quaternion and calculate forward and inverse kinematics, see
1.2Kinematics_Robot.ipynb
using example from this website.
- 2D serial robot with 2 links and 2 joints
- workspace visualization (serial #TODO)
- #TODO test quaternion and dual quaternion with serial robot
- inverse kinematics calculation #TODO
- forward kinematics calculation (serial #TODO)
- 3D serial robot with 3 links and 3 joints
- 2D Parrallel Robot
- workspace visualization ( parrallel #TODO)
- inverse kinematics calculation
- forward kinematics calculation ( parrallel#TODO)
using yourdfpy to load robot defined in URDF format.
- "data/urdf_files": contains urdf files for different robots. Source based on yourdfpy, draw robot in 2D/3D space with matplotlib
dual quaternion reference frame visualisation (#TODO)
see implementations in 1.2Kinematics_Robot.ipynb
with traditional Kalman Filter and Unscented Kalman Filter (filterpy package)

- sigma points visualization
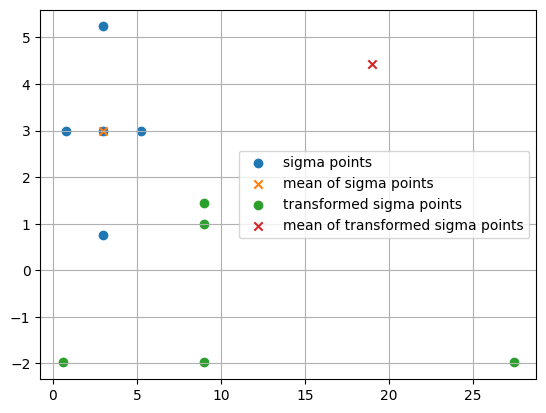 {width=200 height=100}
{width=200 height=100} - UKF estimation result (parameters sensitive)


- Pariticle initialization
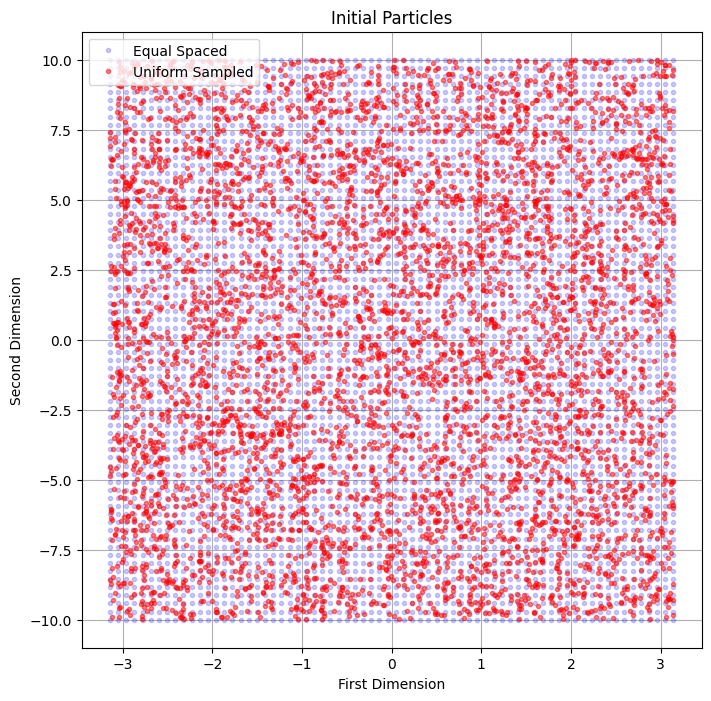 {width=100 height=100}
{width=100 height=100} - Particle Filter estimation result (parameters sensitive)