An intelligent car based on Raspberry-Pi-3.
(中文介绍请往后翻)
Raspberry-Pi-3
L298N
Camera (CSI)
Ultrasonic ranging sensor
Infrared obstacle avoidance sensor
Car (4 motors)
python 3
RPi.GPIO
opencv
picamera
tensorflow
TensorFlow Object Detection API
python 3
opencv
Based on ultrasonic sensor and infrared sensors.
Enter the following commands in Pi Terminal:
cd PythonCode
python3 main_obstacle_avoidance.py
Has been tested.
Enter the following commands in Pi Terminal:
cd PythonCode
python3 camera.py
Besides, if you want to watch the video from PC, then enter the following commands in PC Terminal:
cd PythonCode
python3 pc_receiver.py
Has been tested.
The car will drive along the lanes based on camera.
Enter the following commands in Pi Terminal:
cd PythonCode
python3 main_lane_tracking.py
Besides, if you want to watch the video with the detected lanes from PC, then enter the following commands in PC Terminal:
cd PythonCode
python3 pc_receiver.py
The car will first detect the tennis based on its camera, then it will move to track the tennis.
Enter the following commands in Pi Terminal:
cd PythonCode
python3 main_tennis_tracking.py
Besides, if you want to watch the video with the detected result from PC, then enter the following commands in PC Terminal:
cd PythonCode
python3 pc_receiver.py
Based on TensorFLow Object Detection API, using the 'ssdlite_mobilenet_v2_coco_2018_05_09' pre-trained model.
Enter the following commands in Pi Terminal:
cd PythonCode
python3 main_object_detection.py
(NOTICE: TensorFlow Object Detection API and the ssdlite model are not contained in the repo. See here to install them EdjeElectronics/Tutorial to set up TensorFlow Object Detection API on the Raspberry Pi)
本项目是学校项目设计课程内的项目,要求是使用一个基于树莓派的小车来实现一些简单的功能。
本项目适合初次接触树莓派,希望利用树莓派及小车配件实现一些简单功能的同学们。
目前我们实现的功能有:
- 自动避障:基于超声波和红外,使小车在运行过程中不会撞上障碍物;
- 实时图像传输:将树莓派摄像头拍摄到的视频流传到PC端,并在PC端查看;
- 视觉车道循迹:基于视觉,使小车沿车道线行驶;
- 目标检测:识别并定位摄像头图像中的各类常见物体;
- 网球追踪:基于视觉,使小车追踪一个移动的网球,并与网球保持一定距离。
学校提供的小车的商家是慧净电子,商家提供了一些使用教程,适合初学,基于C语言,实现了一些简单的红外避障、红外寻迹、超声波避障和摄像头调用。
本项目选用Python作为编程语言,有几点原因:Python相比较C语言更简明;我们对Python的掌握情况更好一些(C语言没学好啊);方便之后使用tensorflow做一些深度学习的功能。但同时带来的缺点就是运行速度会差一点。
下面我们会对小车配置、功能实现和使用方法进行详细的介绍。本文结构如下:
- 配置要求
- 项目架构
- 准备工作
- 硬件调试
- 功能实现(原理介绍)
- 功能实现(使用教程)
若想成功实现本项目的功能,请:
- 首先确保完成准备工作
- 之后进行硬件调试
- 之后在阅读过功能实现-原理介绍的基础上
- 根据功能实现-使用教程来运行相应程序、实现功能
- 树莓派3
- 驱动板(L298N)
- CSI摄像头
- 超声波测距传感器
- 红外避障传感器
- 小车车体 + 4个电机
- 电脑 (Ubuntu18.04)
我们的源代码全部放在PythonCode文件夹内。
我们对每个传感器定义了一个类,放在相应的py文件里,由此可以很清晰方便地对每个传感器进行单独的调试。
名称以main开头的文件是实现相应功能的主程序,在主程序里定义了一个Car类,该类继承了所有传感器的类。
商家给树莓派预装了系统,应该是商家自己改过的,也是几年前的了。强烈建议自己将树莓派的系统进行重装(重装后opencv和tensorflow的安装都会简单很多),推荐安装树莓派的官方系统Raspbian。安装方法百度一下,教程很多,也很简单。
关于树莓派教程,推荐树莓派实验室|开箱上手必读,里面的教程基本准确好用。
对树莓派进行操作的方法有很多:
我们基本上是使用SSH登录到树莓派进行操作的,也就是使用putty登录。这需要树莓派和PC在同一个局域网下,我们选择让树莓派创建一个WiFi热点,然后让PC连接这个WiFi热点。方法:创建WiFi热点并开机自启动,其中使用了github上一个开源的库create_ap。同时,还要设置热点开机自动启动。另外注意要设置开启树莓派的SSH服务,否则putty连接会显示失败。
使用官方的源因为众所周知的原因会非常慢且不稳定,所以要换成国内的源。
使用最新版树莓派系统,可以直接用pip3安装OpenCV。
首先需要确定树莓派、驱动板、传感器之间的连线是正确的。
- 工作原理
- H桥
- PWM
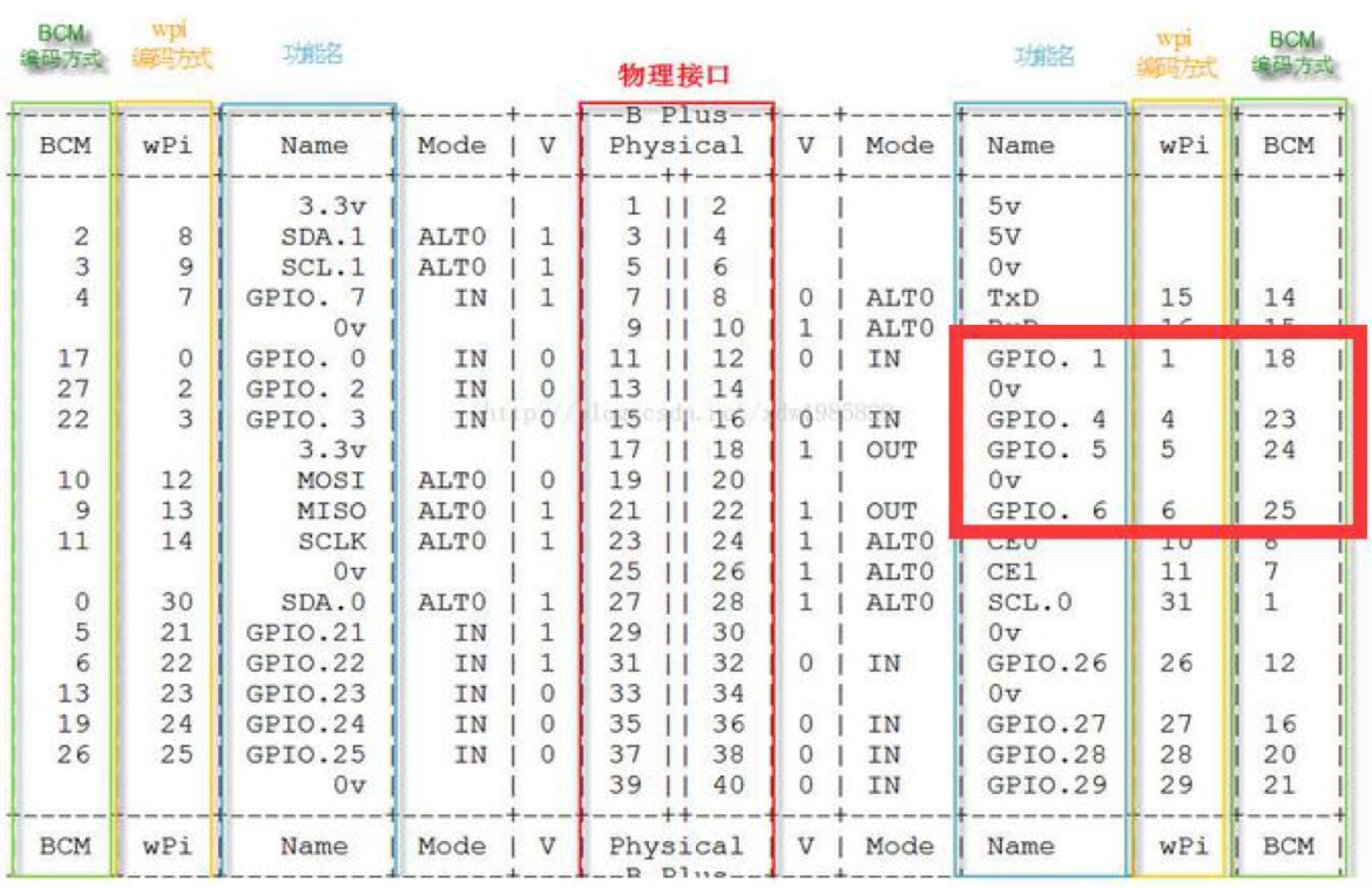
电机相关代码在move.py内。需要注意GPIO端口号的设置,python用的是BCM编码。
在move.py中,定义了前进、后退、左转、右转、停车功能。转弯是通过左右轮差速实现的。
- 超声波测距基本原理
- 超声波测距程序实现
- 提升测距准确性的方法
超声波相关代码在ultrasound.py内,实现了超声波测距和对测距进行移动平均来减小误差。
红外避障相关代码在infrared.py内,InfraredMeasure函数是小车左右的两个红外避障传感器,TrackingMeasure是小车底部两个红外寻线传感器。
注意,红外避障传感器传回0表示前方有障碍物,传回1表示前方无障碍物。
调用摄像头需要先在sudo raspi-config中启用Camera,然后重启。
python调用摄像头有两种方式:
- 使用picamera
- 使用opencv
我们使用的是picamera方式,因为我们发现使用OpenCV的方式会有延时,它返回的第一帧图像是在镜头初始化那一刻的图像,而不是主程序请求时的图像。
具体调用方法参考 树莓派(Raspberry Pi)中PiCamera+OpenCV的使用。
摄像头相关代码在camera.py中,其中实现了:
- 摄像头初始化
- 实时图像传输(发送端),注意HOST为PC在此WiFi网络下的IP地址(通过ifconfig查看),PORT设置一个和接收端相同的端口号就可以。
另外注意,程序终止是一定要关闭摄像机(camera.close()),否则下次无法正常打开。

基于超声波和红外,使小车在运行过程中不会撞上障碍物。
主程序为main_obstacle_avoidance.py,其**很简单,超声波传感器测出小车距离前方障碍物的距离,两边的红外传感器测出两边是否有障碍物,根据测量结果进行运动决策和电机控制。
将树莓派摄像头拍摄到的视频流传到PC端,并在PC端查看。目的是为了便于摄像头姿态的调整和图像处理算法的调试。另外,如果需要的话可以使用传输到PC的图像在PC端进行处理(我们没有实现此功能)。
可选择的传输协议有两种:
- TCP:面向连接,提供可靠地服务,无差错,不丢失,不重复;实时性差,效率低;系统资源要求较多。
- UDP:可以无连接;尽最大努力交付,即不保证可靠交付;实时性强,效率高;系统资源要求较少。
我们使用UDP传输协议进行图像传输。具体实现主要分为发送端和接收端两部分 :
- 发送端:(camera.py VideoTransimssion)
- 图像编码(cv2.imencode)
- 校验数据发送(数据长度作为校验)
- 编码数据发送(socket.sendall)
- 接收端:(pc_receiver.py)
- 接收校验数据(4字节数据)
- 接收图像编码(校验数据后的第一个数据包)
- 简单校验(校验数据 == 编码数据长度)
- 图像解码(cv2.imdecode) 其中,发送端在树莓派端运行,接收端在PC端运行。二者同时运行。
基于视觉,使小车沿车道线行驶。环境要求为白色的地板,黑色(深色)的车道线。
![]()
![]()
主程序为main_lane_tracking.py,其流程大致如下:
- 车道线检测
- 图像二值化,提取车道线
- 提取车道线的内侧点:在图像的特定行,从中间向两侧检索,检测到0像素点及为车道线点。图像左半边检测到的点即为左车道线点,右半边检测到的点即为右车道线点。(为防止因各种原因车道线部分缺失,我们选择图像4个行提取4组车道线内侧点)
- 运动控制
- 运动决策
- 如果两侧车道线都能检测到,则直行
- 如果只能检测到一侧车道线,则有三种情况:
- 该侧车道线靠近图像边缘,则还可以继续直行
- 该侧车道线靠近图像**,则急需转弯,原地旋转
- 该侧车道线位置适中,则缓慢转弯,在前进中转弯
- 如果两侧车道线都检测不到,则维持之前的动作
- 电机控制:根据决策结果,控制小车电机输出
- 运动决策
在本实验中,车道线检测部分较容易实现,我们发现,在这种简单的环境下,固定阈值的二值化效果比大津法好。另外,因为我们的车道线偏蓝色,我们选择提取图像的R通道进行二值化。检测效果如图:

运动控制部分相对较为复杂,我们只采用了一个简单的逻辑,效果还可以。
识别并定位摄像头图像中的各类常见物体。

主程序为main_object_detection.py,其调用了TensorFlow Object Detection API,使用了训练好的的SSDLite目标检测模型,在树莓派端进行目标检测 。
TensorFlow安装方法及TensorFlow Object Detection API配置方法可以完全参考此文档:EdjeElectronics/Tutorial to set up TensorFlow Object Detection API on the Raspberry Pi
或者TensorFlow Object Detection API可以直接clone这位的 xyc2690/Raspberry_ObjectDetection_Camera,可以不用配置TensorFlow Object Detection API,下载即用。
我们使用的SSDLite模型主要优点是运行速度快、占用内存小,适合在树莓派端进行运算。据我们测试,帧率大概为0.8帧/s。我们使用的是树莓派3,如果是更新的型号,速度会更快一点。
基于摄像头,使小车追踪一个移动的网球,并与网球保持一定距离。
主程序在main_tennis_tracking.py中,网球追踪流程大概如下:
实验显示: 在不同光照条件下,网球的色调(H)基本上保持一致,范围大致在25至50 (OpenCV范围),在可靠明亮的光照条件下,范围大致在30至40。
网球检测的程序在detect_new.py中,具体流程如下:
- 关注区域裁切:裁掉不可能出现网球的区域
- 高斯滤波:去除一定噪声
- 霍夫圆检测:检测出图像中所有可能存在的圆(视频中的绿色圆)
- 针对每个检测出的圆的内切正方形:
- RGB to HSV
- 利用HSV域计算符合网球颜色的像素点数目
- 统计上述像素点数目占比
- 选出占比最大的圆,若其占比大于设定阈值,则认为是网球(视频中的红色圆)

经测试,帧率大概在15帧/s。
运动控制的程序在main_tennis_tracking.py中,具体流程如下:
- 移动平均:对检测得网球位置进行移动平均,减小误差
- 决策:根据当前网球相对于小车的位置,决策下一步的动作
- 根据网球x坐标决策转向动作
- 根据网球半径r决策前进后退动作
- 控制:根据决策结果,控制小车电机输出
目前存在的问题:
- 我们使用的小车是4电机四驱差速转向小车,但在没有细致调教的差速控制算法的情况下,这样的配置使得在小车在转弯的时候存在较大的滑动摩擦(a skidding turn),所以转向时小车存在一个“最低启动速度”,当PWM的占空比小于一定值时,小车由于摩擦力的原因无法真的转起来,在原地“蹩着”,所以要小车转起来,只能给一个相对大的速度,这样就很容易转向过度。
- 同时,由于摩擦力,小车在转向时也存在明显的车身抖动,使得转向时拍摄的图像发飘发糊,导致此时网球检测得效果也收到影响,进一步影响了转向追网球的准确性。
- 网球检测的效果受光照的影响还是挺大的,白天光照充足的环境下(白天室外)效果会好很多。
在树莓派终端中输入:
cd PythonCode
python3 main_obstacle_avoidance.py
树莓派发送图像,在树莓派终端输入:
cd PythonCode
python3 camera.py
同时,如果想在PC端接收图像,在PC终端输入:
cd PythonCode
python3 pc_receiver.py
NOTICE:camera.py和pc_receiver.py均需要根据具体情况配置HOST和POST:
- 二者中的HOST均为PC在此WiFi网络下的IP地址(通过ifconfig查看)
- 二者的PORT设置为同一个端口号就可以(eg:8000)。
在树莓派终端输入:
cd PythonCode
python3 main_lane_tracking.py
如果想在PC端接收车道检测图像,则在PC终端输入:
cd PythonCode
python3 pc_receiver.py
在树莓派终端中输入:
cd PythonCode
python3 main_object_detection.py
如果想在PC端接收图像,则在PC终端输入:
cd PythonCode
python3 pc_receiver.py
NOTICE:Tensorflow Object Detection API 和 ssdlite模型并未上传至此仓库,需要自行安装。二者的安装和配置方法请参考此文档:EdjeElectronics/Tutorial to set up TensorFlow Object Detection API on the Raspberry Pi ; 或者TensorFlow Object Detection API可以直接clone这位的 xyc2690/Raspberry_ObjectDetection_Camera,可以不用配置TensorFlow Object Detection API,下载即用。
在树莓派终端输入:
cd PythonCode
python3 main_tennis_tracking.py
如果想在PC端接收网球检测图像,则在PC终端输入:
cd PythonCode
python3 pc_receiver.py