学习资料合集
2022自动驾驶学习资料合集
| Title |
Address |
Replenish |
Done |
| 《动手学深度学习》 |
portal |
练气期阶段完成阅读 主要是计算机视觉及其前导知识 |
✔ |
| 《无人驾驶原理与实践》 |
portal |
练气期阶段完成了规划相关的阅读 在阅读强化学习部分感觉需要补一下概率论以及强化学习的基础 筑基期阶段完成 强化学习这部分没什么可读的 太简陋了 |
✔ |
| 《EASY RL 强化学习教程》 |
portal |
我买的纸质版的 对我这种初学者挺好的 建议可以搭配 Hugging Face hub 提供的课程 我是在学完理论后 对照实现的源码(源码的网站在[机器学习 / 深度学习 / 强化学习 练习网站](# 机器学习-/-深度学习-/-强化学习-练习网站)这个章节)来继续了解算法的** |
✔ |
| 《机器学习导论》 |
portal |
|
✖ |
| 《机器学习》 |
portal |
|
✖ |
| 《统计学习方法(第2版)》 |
portal |
|
✖ |
| Title |
Address |
Replenish |
Done |
| 《C++ Core Guidelines解析》 |
portal |
|
✖ |
| 《C++ 经典设计模式》 |
portal |
21个 C++ 的设计模式,推荐食用,对每个都使用场景和代码都有描述 |
✔ |
| 《Effective C++ 改善程序与设计的55个具体的做法》 |
portal |
|
✖ |
| 《Effective Modern C++》 |
portal |
中文翻译版的翻译的感觉怪怪的,有股 “彼得,我的上帝”这种翻译的感觉。很难让人读下去,但是内容和例子还可以。没看过英文版...解析 |
✔ |
| 《算法的乐趣》 |
portal |
有源码,有公式。只是关于自动驾驶的相关算法比较少。属于包罗万象的那种,我是直接拿来当“算法字典”,如果有需要的算法会来查看这本书是否有介绍。。 |
✔ |
| 《自动驾驶决策规划技术理论与实践》 |
portal |
非常好的书,使我的大脑旋转,推荐反复阅读。其中大部分都是公式推导,源码较少,对非数学专业计算机的我来说不是很友好 |
✔ |
- 这个阶段主要在了解路径规划算法 并在 ros 上跑一下仿真
- 通过 Apollo 了解自动驾驶汽车的每个结构
- 路径规划算法的分类以及各个算法的实现过程
- 了解汽车运动学
- Apollo 的源码并没有看太多 只是看的路径规划部分
- 这个阶段以理论知识和路径规划代码为主的(通过视频、书籍、文章)
Apollo源码
apollol开发者中心
- 后面可能是走规划的路线 所以先看一下规划相关的东西 ps: 未看完 后面就直接上手了
| Title |
Address |
| apollo介绍之planning模块(四) |
portal |
- 对 ros 的学习 ps: 对于 ros 我只是粗浅的学习了一些基本的知识 可以使用和理解代码的程度
- 在泊车的坐标系大致分为 三种 分别是 车辆坐标系 世界坐标系 栅格坐标系
- 在规划的过程中需要不断变换坐标系进行计算
- 变换的时候容易混乱
| Title |
Address |
Replenish |
| 一文详解自动驾驶中的时空坐标系 |
portal |
给出每个坐标系下的公式计算(无推导过程) |
| 一文理清标定中的坐标变换 |
portal |
标定? 现在似乎还没用上 |
| 干货 欧拉角、四元数?晕头转向的空间姿态表示法(上篇) |
portal |
✖ |
| 干货 欧拉角,四元数?晕头转向的空间姿态表示法(下篇) |
portal |
✖ |
| 干货 位置角度平移旋转 “乱七八糟”的坐标变换 |
portal |
✖ |
| ROS TF添加一个坐标系 |
portal |
✖ |
| ROS技术点滴 —— tf坐标变换库 |
portal |
✖ |
| ROS TF2-通过tf2_ros::MessageFilter 将世界坐标系下的点转为期望坐标系下的点 |
portal |
✖ |
| TF2 坐标变换-监听实例 |
portal |
✖ |
- 最近在尝试做规划算法的具体实践
| Title |
Address |
Replenish |
| 实现一下 混合A* 在泊车方面的效果 |
项目传送门 |
这让我对算法的思路和代码的具体实现有了一个初入的了解 也更容易让我读源码 百度的 apollo 或许更适合去当一个说明书? |
| AutowareAuto泊车案例复现及原理简介 |
portal |
看看就行 |
| Title |
Address |
Replenish |
| 混合A* 算法研究 |
portal |
我认为写的不错的一个博客 初次对规划算法的了解 ps: 原作者似乎开启了vip... 之前还能看 |
| 自动泊车实例 |
portal |
对混合A* 结合代码的讲解 |
| 规划控制 Hybrid A* 算法仿真实践 |
portal |
Have read |
| 规划控制 详解自动驾驶轨迹规划 Hybrid A* 算法 |
portal |
Have read |
| 混合A* 算法研究 |
portal |
Have read |
| 自动驾驶轨迹规划之 hybrid A* 算法 |
portal |
原文地址 |
| Hybrid A* 原理与代码 |
portal |
说的挺详细的 对参数和过程不熟悉的推荐看一下 |
| Title |
Address |
Wiki or Replenish |
| 自动驾驶决策控制及运动规划最详细最接地气综述(2022年) |
portal |
Wiki笔记 |
| 综述-深度强化学习在自动驾驶中的应用 |
portal |
Have read |
| 综述-城市道路自动驾驶车辆规划与控制技术 |
portal |
2016 年的一篇综述 其中内容包含较多 主要还是关注的规划部分 wiki笔记 |
| Title |
Address |
Replenish |
| 车辆运动学建模(一) |
portal |
说的并不详细 感觉就是把公式再抄一遍 没有收获!!! |
| 车辆运动学建模(二) |
portal |
说的并不详细 感觉就是把公式再抄一遍 没有收获!!! |
| 移动机器人(一)-运动模型 |
portal |
主要看的是 car-like mobile 部分 |
| Car-like Robot运动模型及应用分析 |
portal |
对模型设计和数学推导详细 比大部分的博客强 wiki笔记 |
| 无人车系统(一)-运动学模型及其线性化 |
portal |
Have read |
| Title |
Address |
Replenish |
| 机器人碰撞检测几何模型设计 |
portal |
Have read |
| Title |
Address |
Replenish |
| 贝叶斯优化(原理+代码解读) |
portal |
Have read |
| Title |
Address |
Wiki or Replenish |
| 自动驾驶汽车 专项课程(多伦多大学) |
portal |
主要看的是 Motion Planning for Self-Driving Cars 这章 wiki笔记 以及 Introduction to Self-Dring Cars 中的 Dynamic Modeling(第四周内容) wiki笔记 有的视频并没有翻译 生肉啃起来有点难受 有些翻译的可能有点问题 |
| Title |
Address |
Replenish |
| 无人驾驶系列知识入门到提高 |
portal |
只看了 路径规划部分 内容比较基础(时间比较久了 质量也一般 感觉还是国外的好一点 2020年的) 有知识前提的观看更好一点 up主的主页有其他内容 |
- 规划控制不分家
- 在对理论知识有一定了解后 就想再深入一下 就把 Apollo 的相关视频课看了一遍 顺便查漏补缺
- 通过代码把 规划/控制算法 的理论通过代码实现
- 后面发现绕不开得去学习 强化学习 就开始补强化学习知识(在这之前已经读完 《动手读深度学习》 并把代码都敲了一遍)
- 在学习的过程中 建议搭配 Hugging Face Hub 和 kaggle 食用
2023.10.09-至今 进入上海酷哇(cowarobot)的 PNC(规划与控制)实习
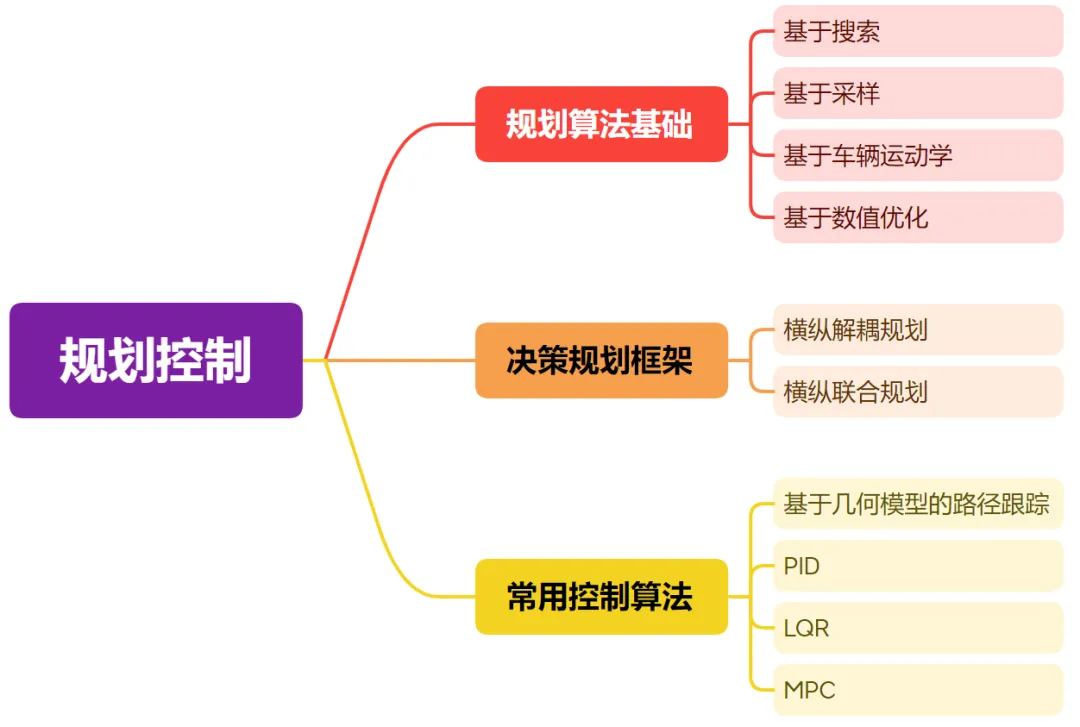
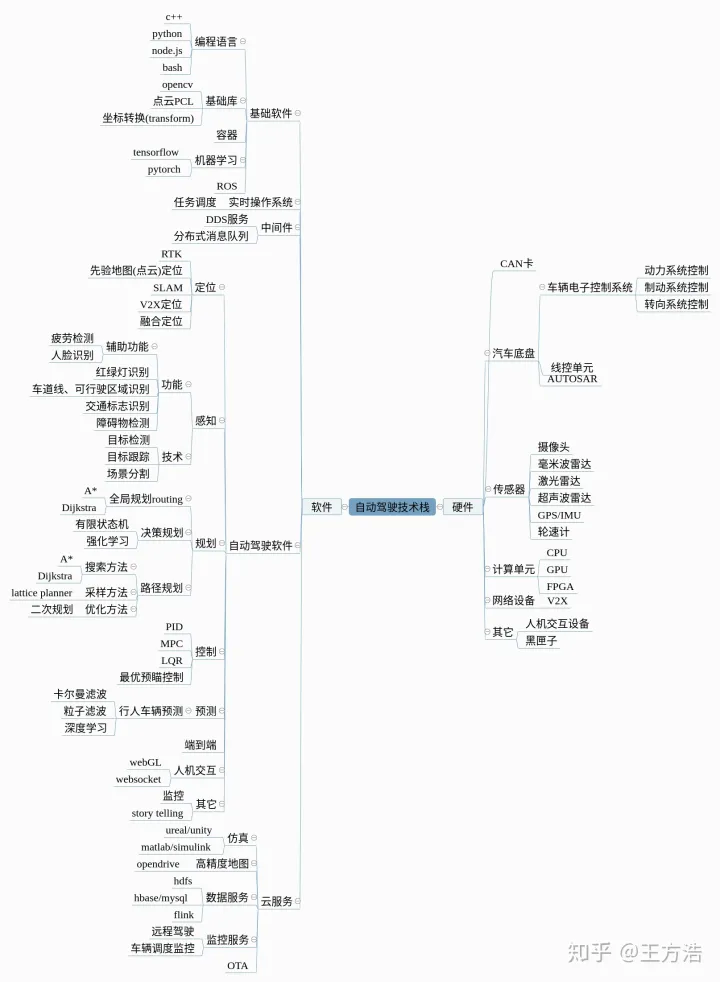
- 对网上一些高赞回答(主要还是知乎)进行一些浏览 总结了回答的主要内容 针对 自动驾驶决策、规划、控制方向 ---> 传送门
- 大部分内容在练气期时已经了解的差不多了 但是感觉还是差点意思
- 想参考一下
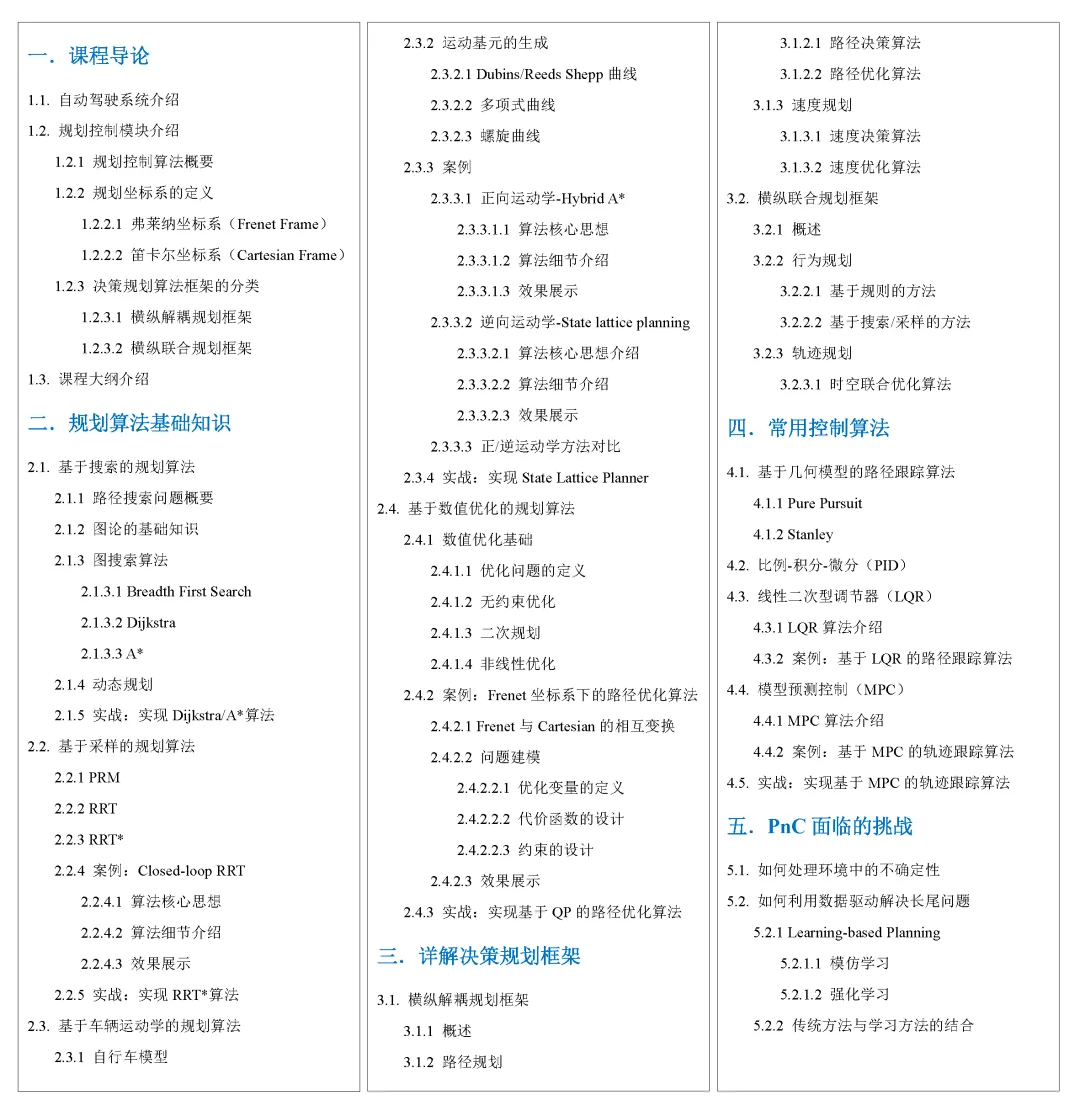
自动驾驶之心的课程大纲来查漏补缺
- c ++ 编程
- 控制算法?
- 基础的规控算法(A*, RRT*, Lattice based, MPC, POMDP, PID, LQR等)
- 参数化曲线构造(多项式、贝塞尔、样条曲线)
- 数值优化常用方法
- 常用算法实现(一阶低通滤波、pid、卡尔曼)
- 理解 lqr mpc 原理 知道缺点和使用条件 针对规划 理解基本的线性拟合
- ros
- 状态机、决策系统
- 掌握 AI 决策规划 这里面分有监督学习和强化学习
- apllo 代码
- 因为本人并非数学专业的,但是又需要去了解一些数学知识。在一些自动驾驶的相关内容中,有些符号、公式以及相关名词在阅读过程中对我造成了一些阻碍(菜就多练),每次去查,再读又有点浪费时间,而且看网上并没有对数学相关的内容集中的解释。所以这部分内容是我在阅读数学的相关知识时,对遇到不懂的数学知识的收集。
-
有很多线上论坛里的人们很愿意向别人解释数学。你可以在屏幕上截张困扰你的符号图,写清楚出处和链接,然后连同你的困惑一起发布在问答网站上。原文链接
Title | Address | Replenish
:-: | :-: | :-:
mathematics | portal | 数学知识的问答网站
cross validated | portal | 亦是关于数学
about my math wiki | portal | 这是我在阅读数学相关书籍时,记录的相关数学符号和名词的解释
| Title |
Address |
Replenish |
Done |
| 吃透《统计学习方法》 |
portal |
|
✖ |
| Title |
Address |
Done |
| 【完整版-麻省理工-线性代数】全34讲+配套教材 |
portal |
✖ |
| 新MIT 线性代数 |
机器学习(中英机翻字幕)18.065 by Gilbert Strang portal |
✖ |
| (高清重制)麻省理工学院 MIT 18.06 线性代数 |
portal |
✖ |
- 还是没逃过 ML、DL、RL 的魔爪
- 我自己学习和练习DRL的仓库 ---> portal
| Title |
Address |
Replenish |
Done |
| Hugging Face |
portal |
主要是 learn 深度强化学习 推荐入门学习 了解算法过程和原理 |
✔ |
| 该仓库包含中文翻译的 Hugging Face 深度强化学习课程大纲 |
portal |
看不懂的可以看一下这个中文翻译 中文课程在 notebook 文件中 |
✔ |
| kaggle |
portal |
里面的人说话又好听 个个都是人才 我超喜欢这里的 |
✔ |
| 强化学习的基本算法 |
portal |
项目地址更新了 强化学习基本算法都有源码(仓库移至) |
✔ |
| Deep-Reinforcement-Learning-Algorithms |
portal |
深度强化学习算法具体应用 这个更直观一点 有图有真相 |
learing |
| python |
portal |
?想重新拾起python |
✔ |
| PyTorch 深度学习简介 |
port |
框架得学一下吧 |
✖ |
| 60 分钟内的 PyTorch |
portal |
这次一定 |
✔ |
| 深度学习入门之PyTorch |
portal |
了解了解得了 |
✖ |
| 本项目将《动手学深度学习》(Dive into Deep Learning)原书中的 MXNet 实现改为PyTorch实现 |
portal |
我之前是把 MXNet 版本的敲了一遍 |
✔ |
| 《机器学习》(西瓜书)公式推导解析 |
portal |
等着搭配实书食用 |
✖ |
| 《李宏毅深度学习教程》 PDF下载 |
portal |
收藏从未停止 |
✖ |
| 深度学习500问,以问答形式对常用的概率知识、线性代数、机器学习、深度学习、计算机视觉等热点问题进行阐述 |
portal |
对理论有困惑可以常来看看 |
✔ |
| 一个优雅的 PyTorch 深度强化学习库 |
portal |
扶我起来 还能学 |
✔ |
| 蘑菇书EasyRL |
portal |
我直接看的实体书 |
✔ |
| 李宏毅(Hung-Yi Lee)指导的 15 个机器学习作业的代码和幻灯片 2022 |
portal |
ML |
✖ |
| 这是《Learn Deep Learning with PyTorch》一书的代码 |
portal |
大佬的仓库收藏就对了 |
✔ |
| 适合所有人的开源机器学习框架 |
portal |
不知道适不适合我 |
✖ |
| Title |
Address |
Replenish |
Done |
| 2022吴恩达机器学习Deeplearning.ai课程 |
portal |
|
✖ |
| 深度学习超全实战项目合集 |
portal |
|
✖ |
| 李宏毅2023春机器学习课程 |
portal |
|
✖ |
| 李宏毅2021/2022春机器学习课程 |
portal |
|
✖ |
| 浙江大学-机器学习 |
portal |
|
✖ |
| 强化学习之基础(英文 无中文字幕) |
portal |
留给听力好的 |
✔ |
| 强化学习及其在竞速无人机中的应用 |
portal |
个人爱好 |
✔ |
| Title |
Address |
Replenish |
Done |
| 最优化理论 |
portal |
|
✖ |
| Title |
Address |
| 轨迹预测与运动预测相关paper汇总 |
portal |
- 最初的时候也看了一点 apollo 的视频课 但浅尝辄止
- 准备扫一下盲
- 因为后面直接进公司实习了,所以这部分的内容就没有继续了解。直接从实践中学习了。
| Title |
Address |
Replenish |
| Apollo b站首页 |
portal |
不定期分享内容 |
| Apollo 视频课主页 |
portal |
不定期更新 |
| 自动驾驶新人之旅 |
portal |
这个入门级的 对安装环境和技术介绍 |
| Apollo 自动驾驶入门课程 |
portal |
看的是规划和控制部分 ps:每个视频就两分钟左右 (吐槽不会自动跳到下一集) 算是对之前学到的东西复习一下 |
| Apollo 星火计划 2.0 |
portal |
对 Apollo 代码模块的讲解 看的是规划模块和控制模块部分 建议带着代码一起看 |
| Apollo 自动驾驶技术详解 25 讲 |
portal |
看的是自动驾驶规划技术和控制技术部分 主要是 apollo 结构 |
| Apollo 星火计划之 PnC 专项 |
portal |
自动驾驶决策规划技术 ✖ |
| 2023-Apollo星火培训PnC专项 |
portal |
✖ |
| Title |
Address |
Replenish |
| 【直播回放】2023星火培训PnC专项营第一讲:Planning 2.0综述 |
portal |
简单介绍此次的更新内容和一些 very 基础的东西。以及环境安装流程 |
| 【直播回放】2023星火培训PnC专项营第二讲:理解Planning 2.0 参数配置 |
portal |
... |
| Title |
Address |
Replenish |
| 无人驾驶技术系统 |
portal |
大部分是公式推导 有仿真的代码测试 |
| 自动驾驶规划入门(已完结) |
portal |
质量不知道怎么样(收费的)感觉没必要 里面的内容随便都能找到 |
| Apollo自动驾驶预测规划控制算法 |
portal |
Have read |
| Title |
Address |
wiki |
| 何为轨迹预测?我们为什么需要轨迹预测?(自动驾驶轨迹预测-综述) |
portal |
wiki笔记 |
| 最新综述 自动驾驶决策都有哪些数据集?一文尽览 |
portal |
Have read |
- 这部分是我的列表中的道友,我觉得其中的部分对我来说可借鉴(排名不分先后)
| Title |
Address |
Replenish |
| 万字聊聊百度Apollo自顶向下的自动驾驶之路 |
portal |
Have read |
| 汇总!自动驾驶路径规划中的障碍物处理方法总结 |
portal |
相关文献中 障碍物约束处理的常用处理方法 |
| 一文搞懂梯度下降 |
portal |
怎么感觉是吴恩达老师的 PPT? |
| 三张图读懂机器学习:基本概念、五大流派与九种常见算法 |
portal |
就简单介绍了下基本概念 适用场景 公式、具体**都没有 |
| 图解 72 个机器学习基础知识点 |
portal |
算是对基本术语的解释 |
| 深度学习神经网络基础知识总结 |
portal |
真.基础 |
| 深度学习入门宝典:浅谈深度神经网络 |
portal |
简单解释如何创建网络以及 变量的含义 |
| 马尔可夫链 小白都能看懂的马尔可夫链详解 |
portal |
简单了解概念还行 想懂还是去看书 |
| 自动驾驶最新的技术栈有哪些?今天给大家盘点下 |
portal |
基础技术栈,本人仅关注规划方面 |
| Frenet坐标系下的无人车轨迹规划详细讲解与ROS实现 |
portal |
frenet 坐标在规划方面的使用 |
| 从欧拉角到旋转位移矩阵再到变换矩阵 |
portal |
欧拉角变换的详细介绍,包括矩阵变换的公式和内旋外旋 |
| 机器学习与优化基础(Machine Learning and Optimization) |
portal |
常用的优化方法,虽然是机器学习,但其中的数学内容在自动驾驶中也会使用 |
| 优秀计算机科学与技术领域相关的书籍归档 |
portal |
几乎有各类的编程书籍,类似图书馆。有些貌似收费,而且大部分链接有些失效了 |


