本仓库包含 LVI-SAM 的修改代码以便于使用,目的是解决原始的 LVI-SAM 外参配置混乱的问题。使用这份代码,你只需要配置 LiDAR 和 IMU 之间的外参 (T_imu_lidar)、Camera 和 IMU 之间的外参 (T_imu_camera),以及 IMU 本身的属性 (绕着哪个坐标轴逆时针旋转输出正的欧拉角),然后你就可以在不同的设备上运行 LVI-SAM 。
许多数据集的测试视频可以在 YouTube(点击下面的图片打开)和 Bilibili 上找到。
这个仓库的依赖库与官方 LVI-SAM 相同。所以如果编译出现问题,建议先编译官方的 LVI-SAM。目前我们只在 Ubuntu 20.04 + ROS-noetic 环境中进行了测试。
- Ubuntu20.04 + OpenCV4.0.* + ROS noetic + gtsam4.0.* + Ceres1.14.* 参考: https://blog.csdn.net/qq_37868055/article/details/129288903
-
"new"分支可用了,我们建议您使用"new"分支。因为原始 LVI-SAM 代码中的 LIO 系统使用了旧版本的 LIO-SAM,其中存在一些 bug,这些 bug 已在最新的 LIO-SAM 代码中修复。目前,我们已经将最新版本的 LIO-SAM 更新到 LVI-SAM 中,因此系统更加鲁棒。您可以使用以下命令下载并编译 "new"分支。
-
"new"分支已合并到默认分支
mkdir -p ~/lvi-sam/src cd ~/lvi-sam/src git clone https://github.com/NeSC-IV/LVI-SAM-Easyused.git cd .. catkin_make
source devel/setup.bash
roslaunch lvi_sam Husky.launch- 运行后,在
~/lvi-sam/results/下会自动保存地图文件和轨迹文件。
# pcd转txt,位于~/lvi-sam/src/LVI-SAM-Easyused/pcd2tum.py
# pip install pyntcloud
python pcd2tum.py- 安装evo评估工具
# https://github.com/MichaelGrupp/evo
pip install evo --upgrade --no-binary evo- 拷贝真值轨迹, gt.txt
~/lvi-sam/results/gt.txt- 计算误差
# -r full (旋转+平移) trans_part (平移m) angle_deg (旋转deg)
evo_ape tum gt.txt lvisam.txt -r full -va --plot --plot_mode xy --save_plot ./lvisamplot
# 多轨迹绘制
# evo_traj tum lvisam.txt fastlio2.txt kissicp.txt --ref=gt.txt -va -p --plot_mode=xy --save_plot ./trajall- 相机内参,相机-IMU,LiDAR-IMU外参已配置到Husky_camera.yaml,Husky_lidar.yaml中
params_camera.yaml: 设置 VIO 外参,尤其是 T_imu_camera,它是 Camera 位姿在 IMU 坐标系下的表示。它和 VINS-Mono 是一样的。
###################### extrinsic between IMU and Camera ###########################
###################### T_IMU_Camera, Camera -> IMU ###########################
# R_imu_camera
extrinsicRotation: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 0, 0, -1,
-1, 0, 0,
0, 1, 0]
# t_imu_camera
extrinsicTranslation: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [0.006422381632411965, 0.019939800449065116, 0.03364235163589248]params_lidar.yaml: 设置 LIO 外参,尤其是 T_imu_lidar,它是 LiDAR 位姿在 IMU 坐标系下的表示。
###################### extrinsic between IMU and LiDAR ###########################
###################### T_IMU_LiDAR, LiDAR -> IMU ############################
# t_imu_lidar
extrinsicTranslation: [0.0, 0.0, 0.0]
# R_imu_lidar
extrinsicRotation: [-1, 0, 0,
0, 1, 0,
0, 0, -1](注意: 这是 IMU 本身的属性,和它的安装方式没有关系。)
由于官方数据集的 IMU 比较特殊(欧拉角坐标系不同于加速度、角速度坐标系),所以还需要设置 IMU 绕哪个轴 逆时针 旋转得到 正 的欧拉角。 对于官方的传感器设备,设置如下。
## 对绝大多数IMU来说,下面三个值分别是"+z", "+y", "+x" (for most of IMUs, the following config is "+z", "+y", "+x")
# 绕着哪个轴逆时针转动,输出yaw角度为正(which axis the IMU rotates around counterclockwise to get a positive yaw angle)
yawAxis: "-z"
# 绕着哪个轴逆时针转动,输出pitch角度为正(which axis the IMU rotates around counterclockwise to get a positive pitch angle)
pitchAxis: "+x"
# 绕着哪个轴逆时针转动,输出roll角度为正(which axis the IMU rotates around counterclockwise to get a positive roll angle)
rollAxis: "+y"

对于大多数 IMU,欧拉角坐标系与加速度、角速度坐标系相同。 所以上面的参数应该设置如下。
## 对绝大多数IMU来说,下面三个值分别是"+z", "+y", "+x" (for most of IMUs, the following config is "+z", "+y", "+x")
# 绕着哪个轴逆时针转动,输出yaw角度为正(which axis the IMU rotates around counterclockwise to get a positive yaw angle)
yawAxis: "+z"
# 绕着哪个轴逆时针转动,输出pitch角度为正(which axis the IMU rotates around counterclockwise to get a positive pitch angle)
pitchAxis: "+y"
# 绕着哪个轴逆时针转动,输出roll角度为正(which axis the IMU rotates around counterclockwise to get a positive roll angle)
rollAxis: "+x"

-
-
运行 launch 文件:
roslaunch lvi_sam run.launch注意: 如果你想测试原始官方 LVI-SAM 代码(例如在 CMakeLists.txt 中设置 add_definitions(-DIF_OFFICIAL=1) 来编译),你应该运行 launch 文件如下。
roslaunch lvi_sam run_official.launch -
播放数据包,例如 handheld.bag:
rosbag play handheld.bag -
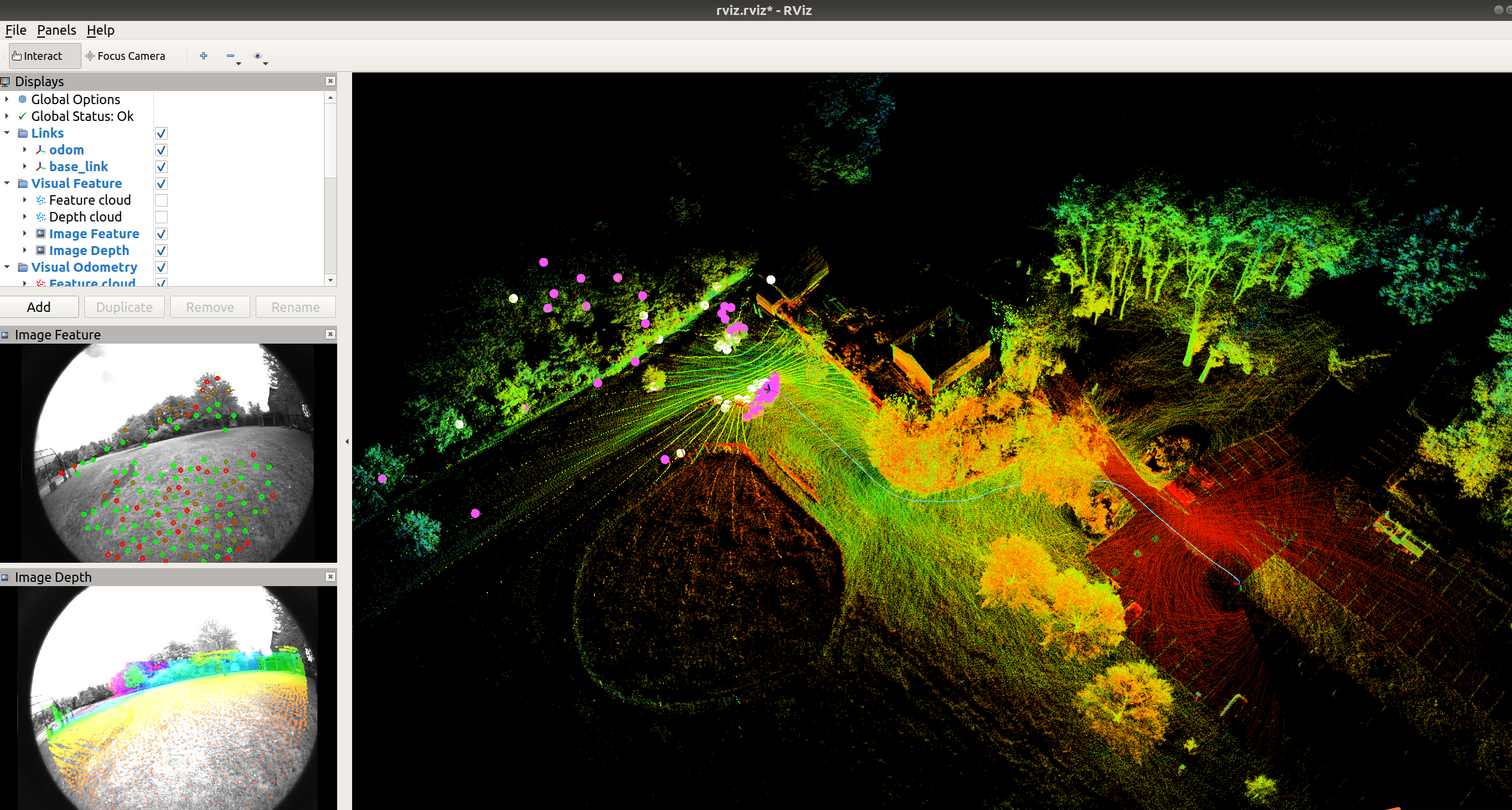
原始官方代码(上图)和我们修改后的代码(下图)在 handheld.bag 上的运行结果:
-
-
-
运行 launch 文件:
roslaunch lvi_sam M2DGR.launch -
播放数据包,例如 gate_01.bag:
rosbag play gate_01.bag -
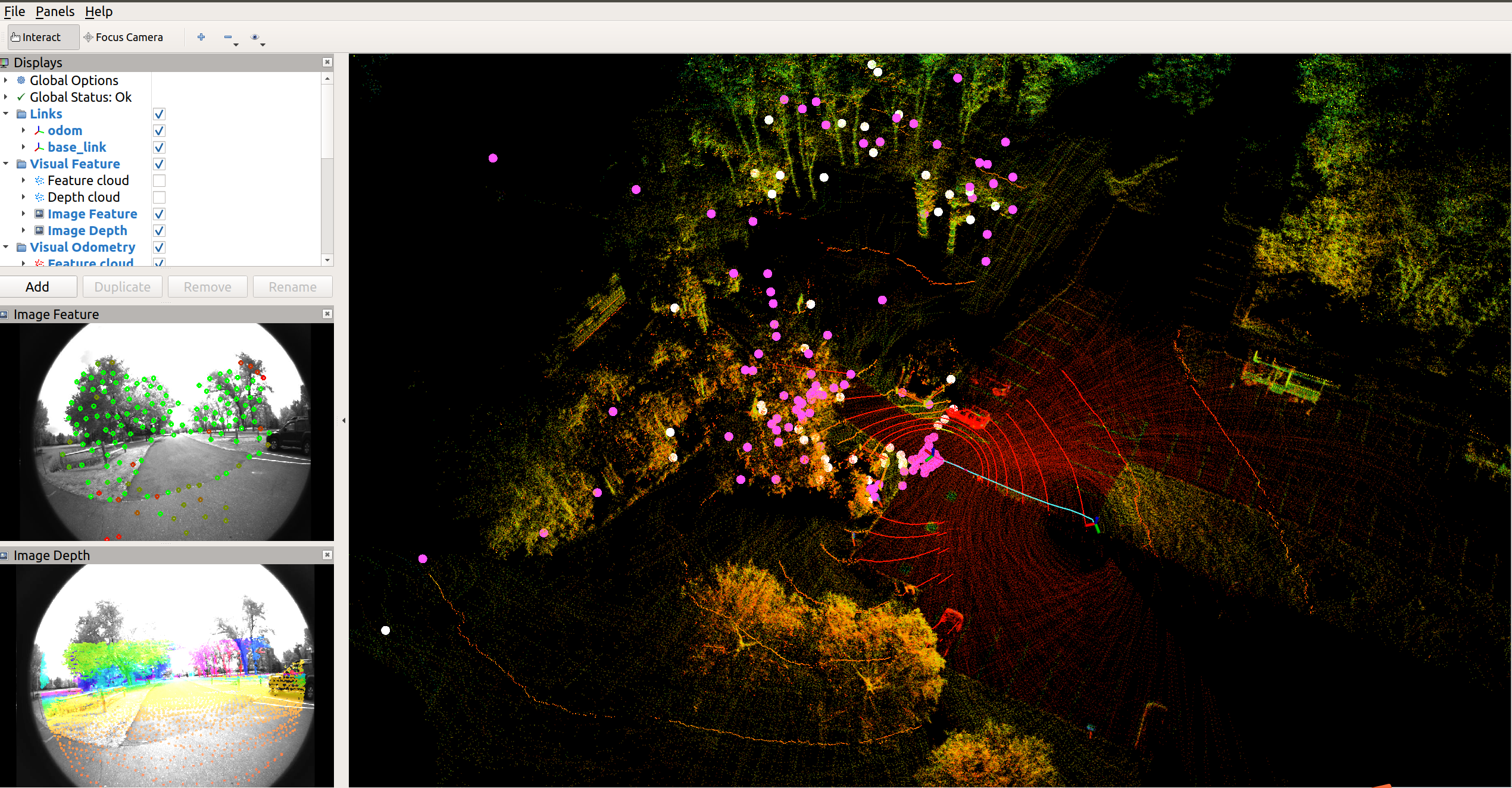
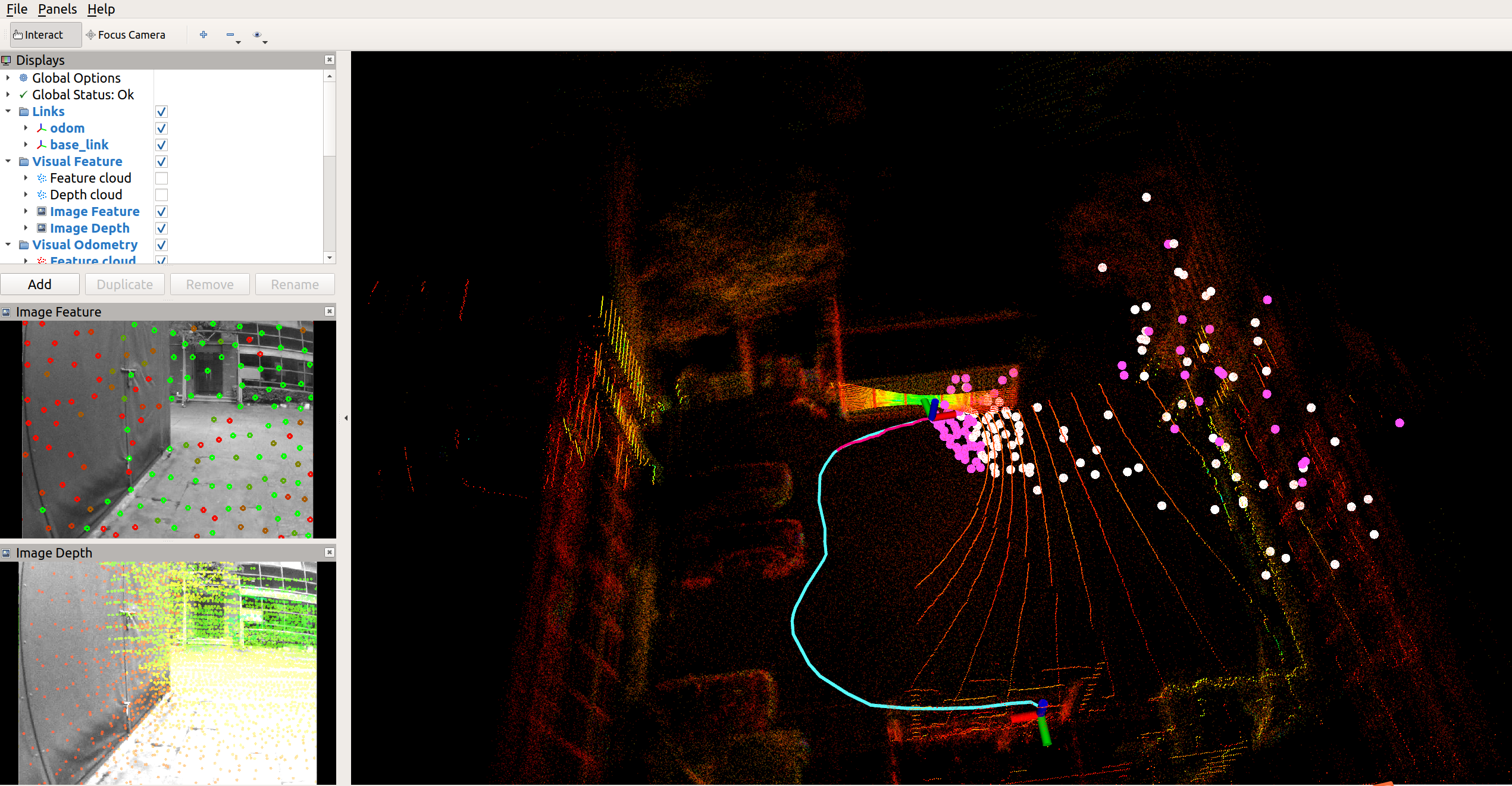
我们修改后的代码在 gate_01.bag 上的运行结果:
-
-
-
运行 launch 文件:
roslaunch lvi_sam UrbanNavDataset.launch -
播放数据包。我们提供的参数是 UrbanNav-HK-Data20200314 的参数,如果你使用 UrbanNavDataset 的其他数据包,请检查配置参数是否需要改动。
rosbag play 2020-03-14-16-45-35.bag -
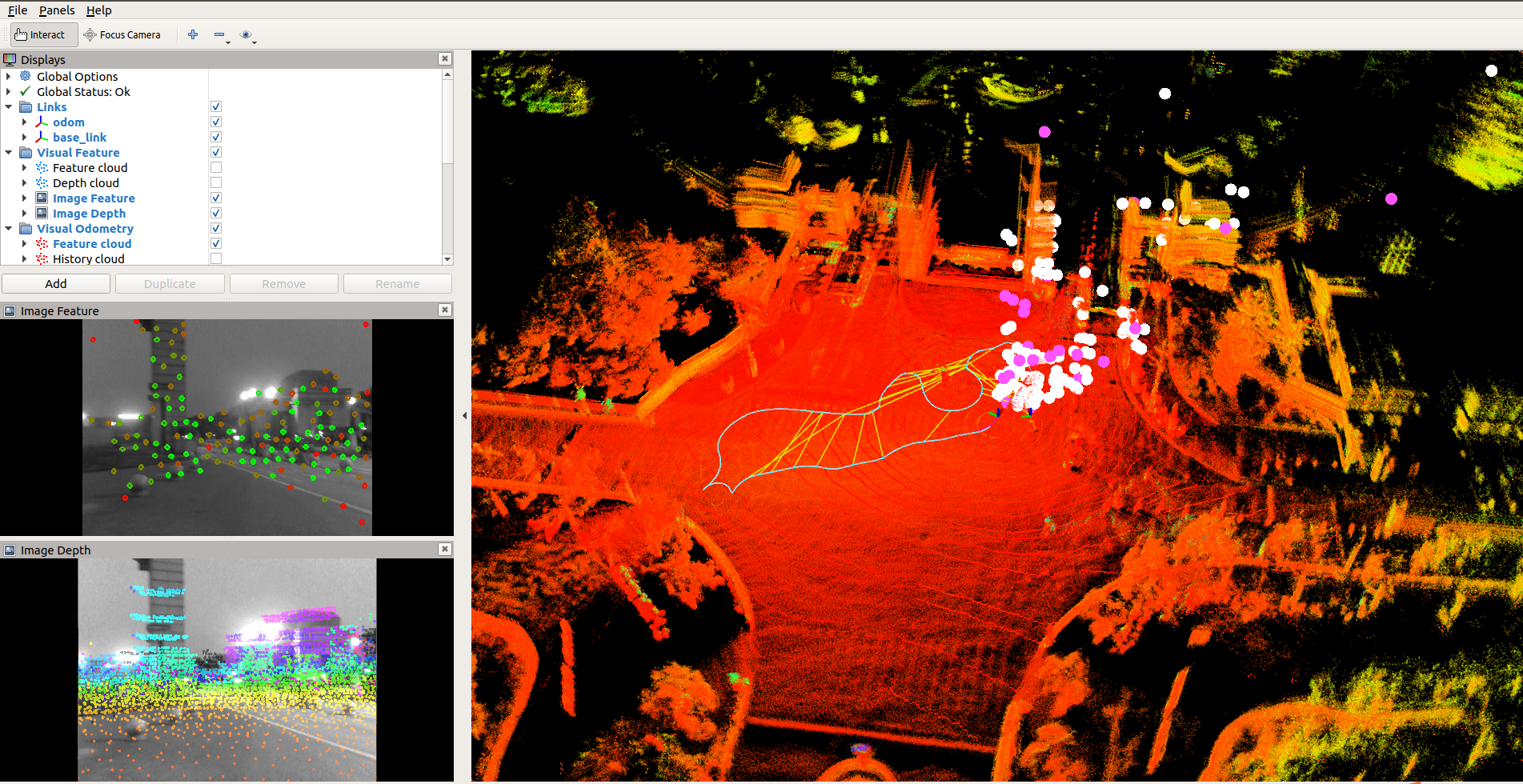
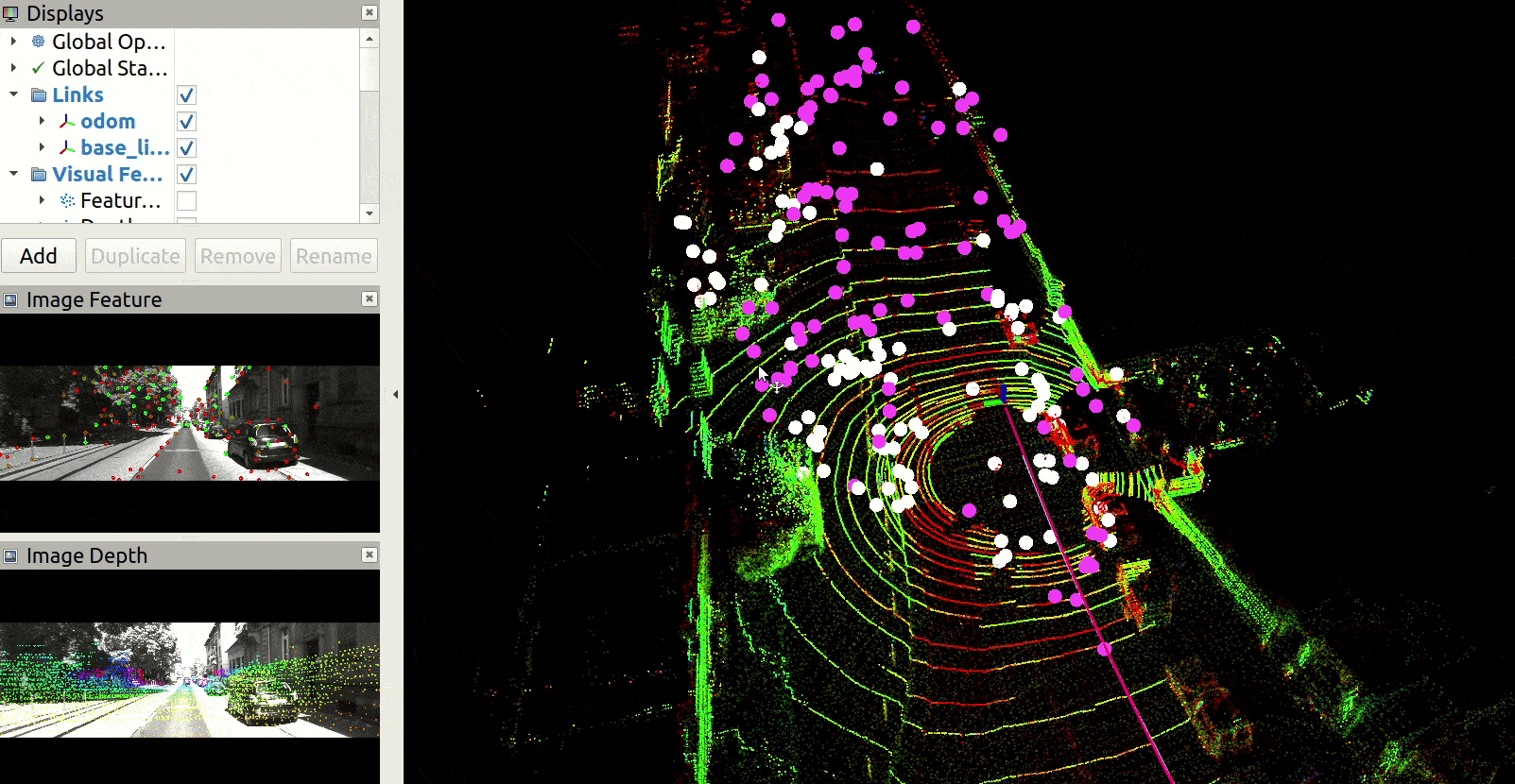
我们修改后的代码在 UrbanNav-HK-Data20200314 上的结果:
-
-
-
运行 launch 文件:
roslaunch lvi_sam KITTI.launch -
播放数据包。注意你必须使用 KITTI raw dataset 而不是 KITTI Odometry dataset,因为后者的 IMU 数据是经过处理的,频率太低了。如果你想使用 KITTI raw dataset,你首先需要把它转成 rosbag。 你可以参考 LIO-SAM/config/doc/kitti2bag 进行操作。这里我们使用 KITTI_2011_09_26_drive_0084_synced 原始数据转化得到 rosbag。转化后的数据包可以在 这个链接 下载。
rosbag play kitti_2011_09_26_drive_0084_synced.bag -
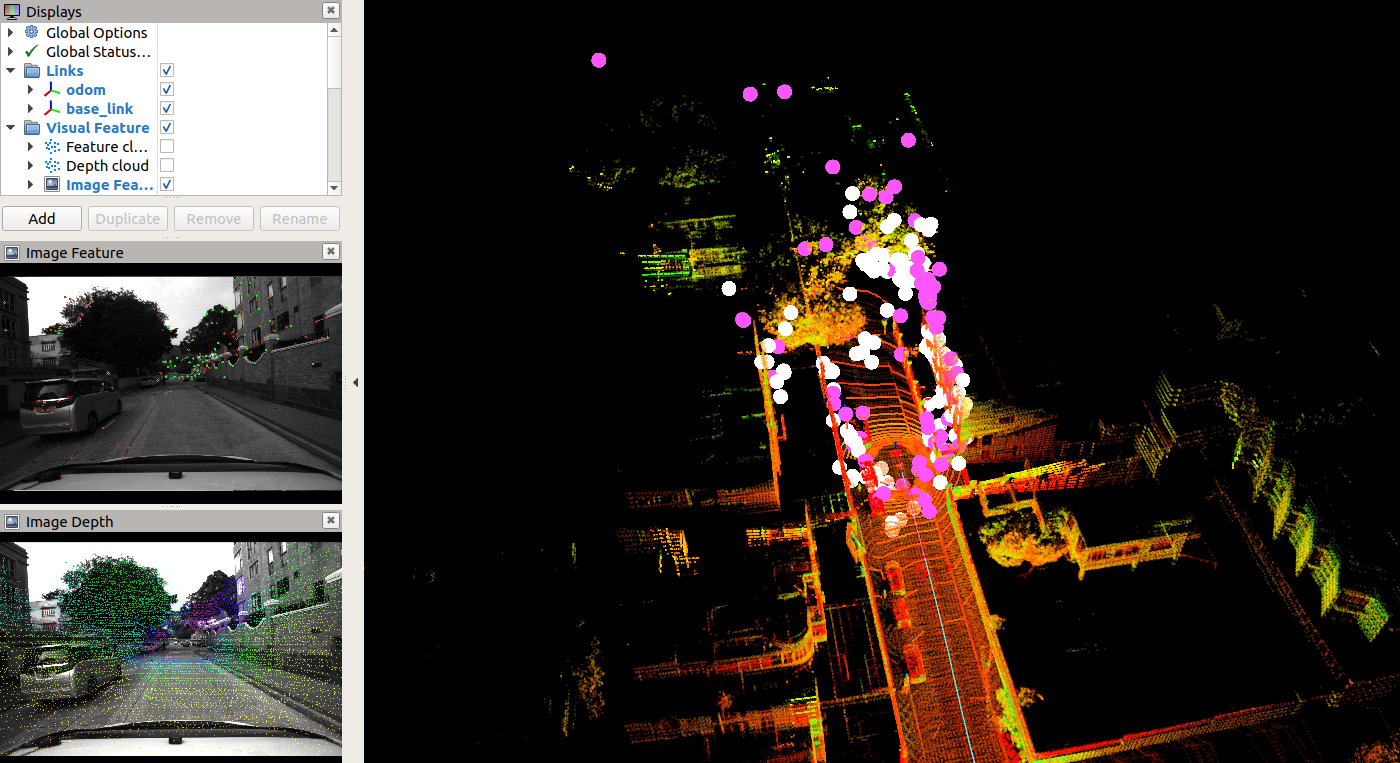
我们修改后的代码在 kitti_2011_09_26_drive_0084_synced.bag 上的运行结果:
-
-
-
运行 launch 文件:
roslaunch lvi_sam backbag.launch -
播放数据包,例如 backbag.bag:
rosbag play backbag.bag -
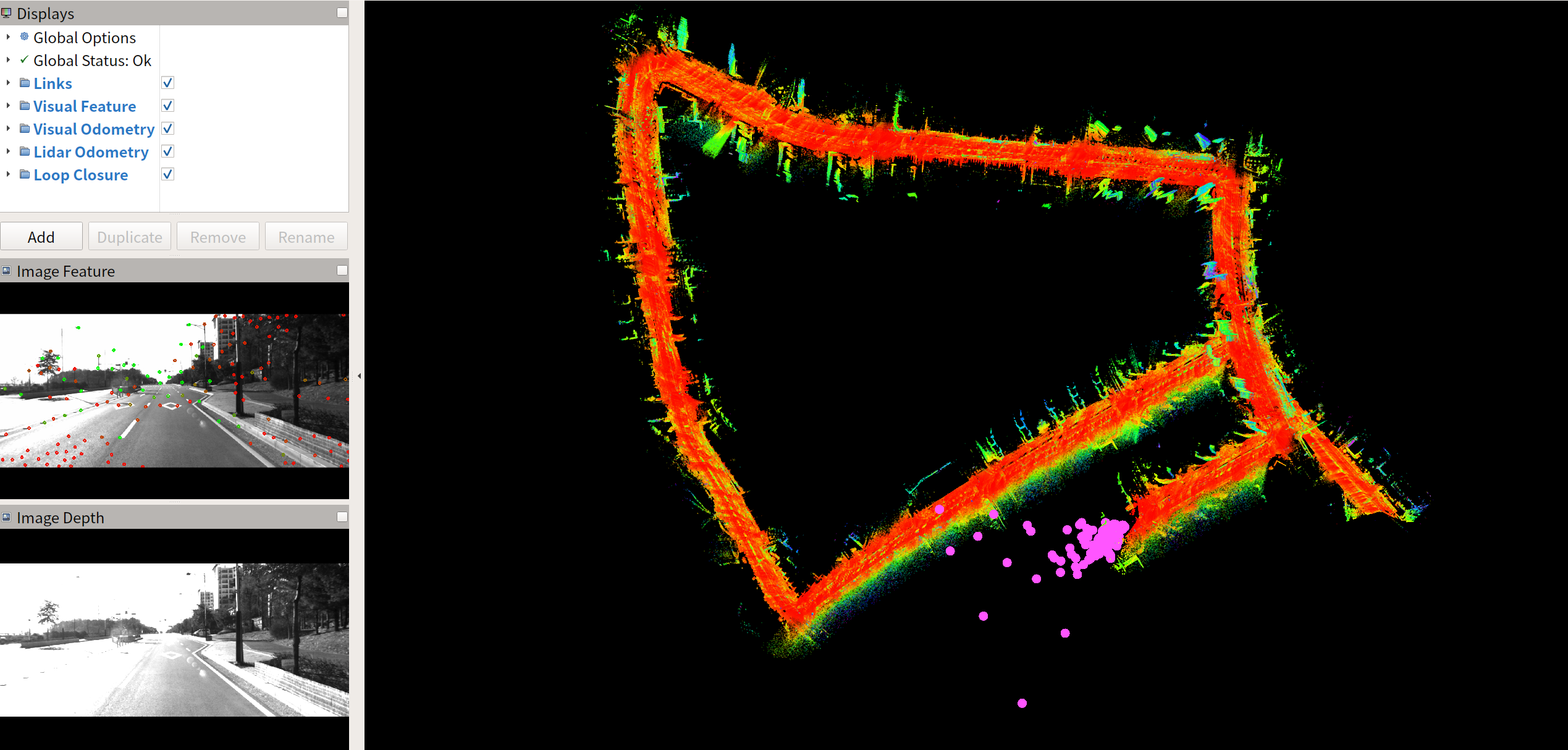
我们修改后的代码在 backbag.bag 上的运行结果:
-
我们修改后的代码在 0117-1525.bag 上的运行结果(这个数据包的设备不同于 backbag.bag,所以它的参数配置和 backbag.bag 也不一样。由于隐私问题,这个数据包不能开源,请见谅):
roslaunch lvi_sam ljj.launch rosbag play 0117-1525.bag
-
-
参见 TODO.







-
对不同数据集进行更多测试,例如 KAIST Complex Urban Dataset。 但是,这些数据集的激光雷达数据没有ring信息,所以LVI-SAM不能直接运行。 如果要在这些数据集上运行,需要修改代码添加此信息参考LeGO-LOAM -
我们在“new”分支上测试了KAIST Complex Urban Dataset。 我们主要做了两个改动:
- 我们将最新版本的 LIO-SAM repo 代码更新为 LVI-SAM,因此系统更加健壮,可以在 KAIST Complex Urban Dataset 上成功运行。
- 我们从原始的 KAIST Complex Urban Dataset 生成 rosbag,并恢复 LiDAR 点云的 “ring” 和 “time” 字段。 您可以使用doc/kaise-help 中的 ros 包来生成 rosbag。
-
在 KAIST Complex Urban Dataset urban26 序列上测试:
-
运行 launch 文件:
roslaunch lvi_sam KAIST.launch -
播放生成的 rosbag,例如 urban26.bag:
rosbag play urban26.bag -
我们修改后的代码在 urban26.bag 上的运行结果:
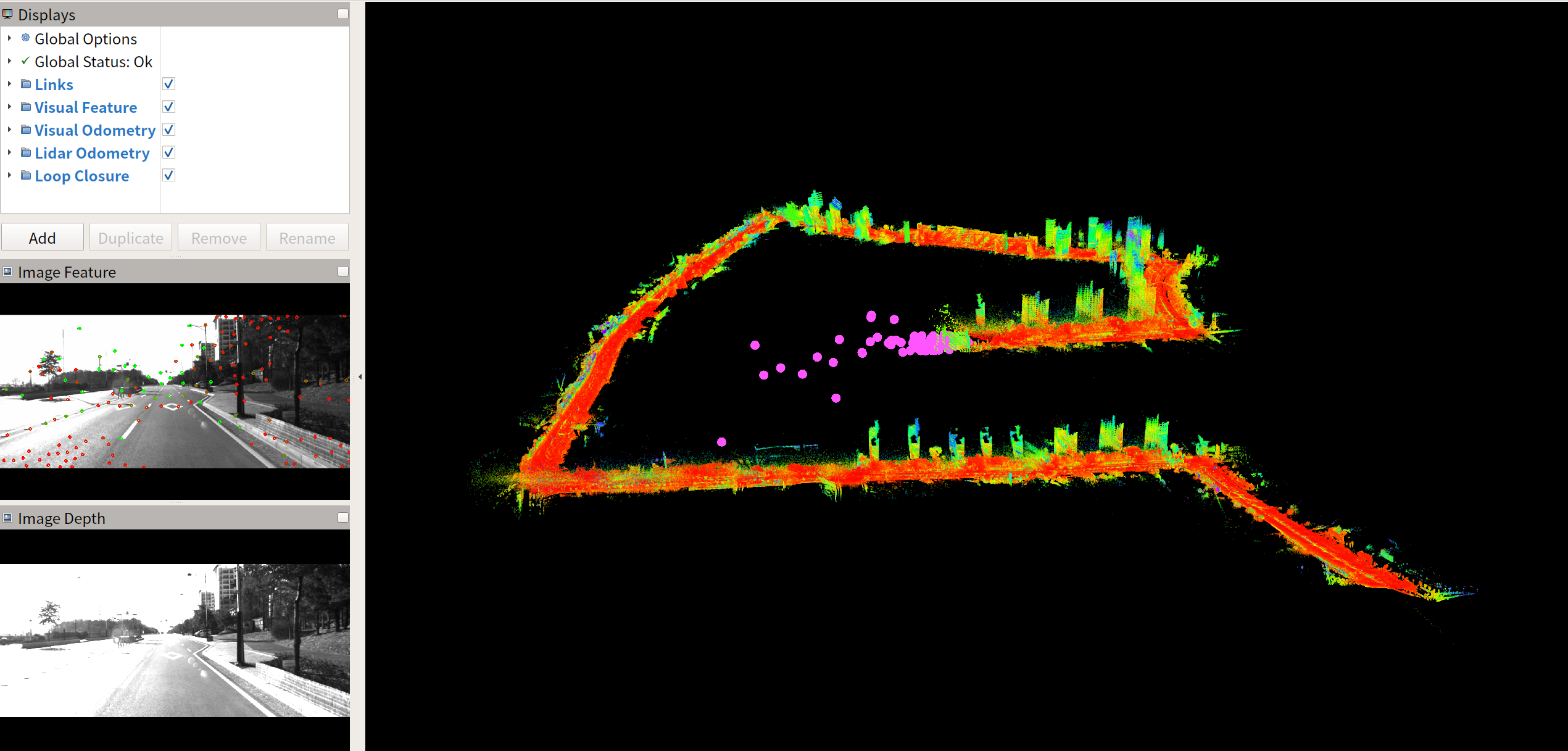
可以看到轨迹有很大的漂移,没有成功检测到闭环。 这可能是由于 KAIST 数据集的 LiDAR 倾斜安装的原因,导致配准的有效点云太少。
-


- 此代码只是修改了 LVI-SAM 的外参配置以便于使用,它的目的是让你更快地在其他数据集和你自己的设备上运行 LVI-SAM,所以它 没有 修改 LVI-SAM 的算法部分。
- 如果你想知道我做了哪些改动以及为什么这些改动有效,你可以参考我的博客:[LVI-SAM坐标系外参分析与代码修改,以适配各种数据集](https://blog .csdn.net/qq_42731705/article/details/128344179)。
- 我对 LVI-SAM 代码做了中文注释,仓库参见 LVI-SAM-CC_Comments 。
- 原始的官方 LVI-SAM