
- ROS package for igus ReBel tutorial.
- Docker for simulation and control environments for igus ReBel.
-
- Docker 20.10.22
- Docker Compose 2.4.1
-
- Docker 26.1.1
- Docker Compose 2.27.0
- Connect an Ethernet cable between the host computer and the Ethernet port of ReBel
- Set the network configuration as below
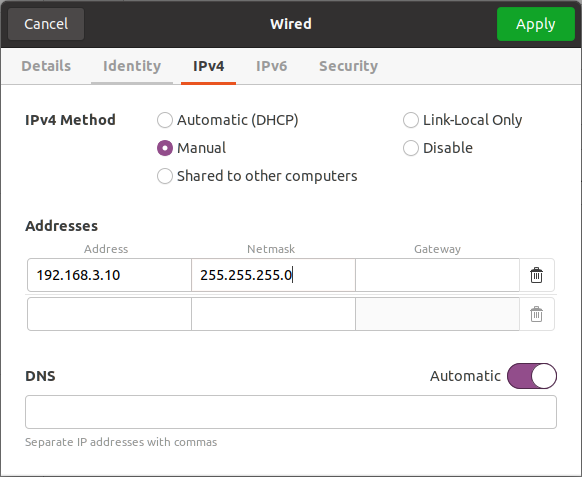
- The ros node expects to reach the robot at the IP and port
192.168.3.11:3920 - This is set in igus_rebel/igus_rebel/src/IgusRebel.cpp
- The ros node expects to reach the robot at the IP and port
- Build the docker environment as below

sudo apt install byobu && git clone git@github.com:Osaka-University-Harada-Laboratory/rebel_tutorials.git --depth 1 && cd rebel_tutorials && COMPOSE_DOCKER_CLI_BUILD=1 DOCKER_BUILDKIT=1 docker compose build --no-cache --parallel - Build and run the docker environment
- Create and start docker containers in the initially opened terminal
docker compose up
- Connect to the robot
xhost + && docker exec -it rebel_container bash -it -c "roslaunch rebel_tutorials rebel.launch"- Run a command on the host machine
- The Joint Velocity Controller commands a desired velocity to the joint.
-
xhost + && docker exec -it rebel_container bash -it -c "rostopic pub /joint_velocity_controller/command std_msgs/Float64MultiArray '{layout: {dim: [], data_offset: 0}, data: [0.2, 0.2, 0.2, 0.2, 0.2, 0.2]}'"
-
xhost + && docker exec -it rebel_container bash -it -c "rostopic pub /joint_velocity_controller/command std_msgs/Float64MultiArray '{layout: {dim: [], data_offset: 0}, data: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]}'"
-
- Build and run the docker environment
- Create and start docker containers in the initially opened terminal
docker compose up
- Execute the container in another terminal
xhost + && docker exec -it rebel_container bash
- Run a demonstration in the container
byobu
- First command & F2 to create a new window & Second command ...
- Ctrl + F6 to close the selected window
Takuya Kiyokawa
Kazuki Higashi
We always welcome collaborators!
This software is released under the BSD-3-Clause License, see LICENSE.