Warning
This repository is no longer maintained and has been superseded by Gait-Tracking.
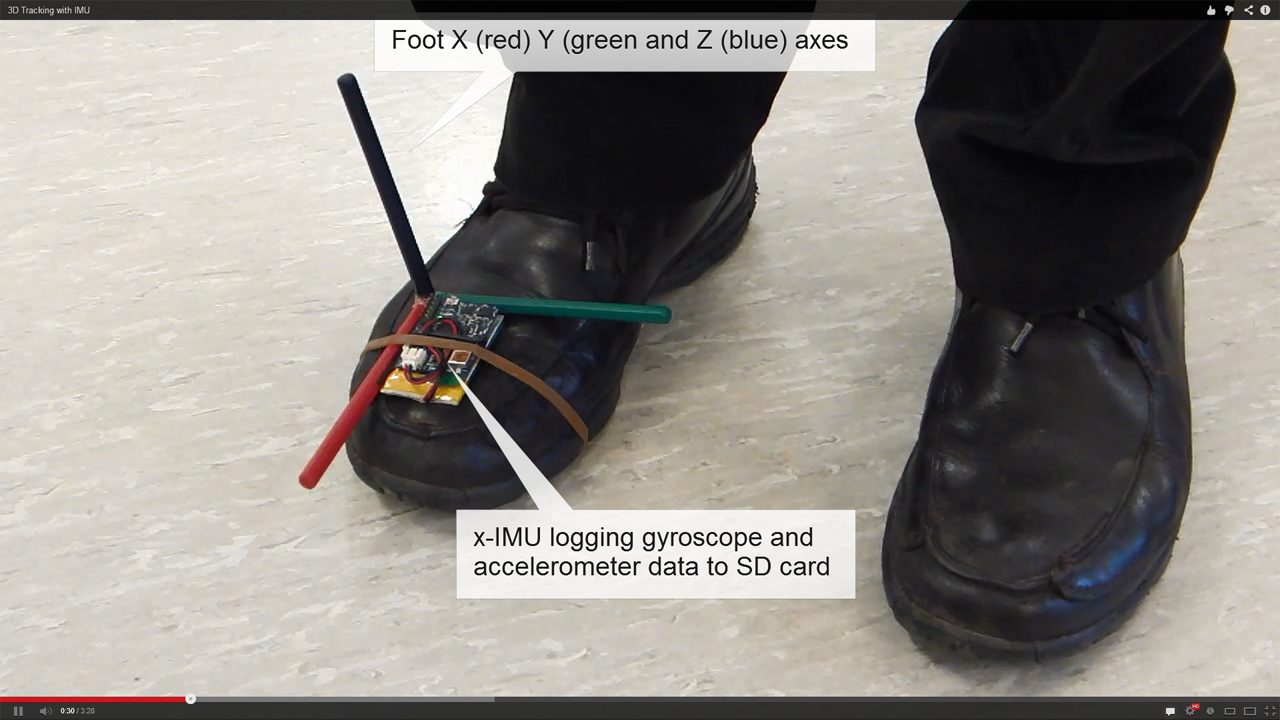
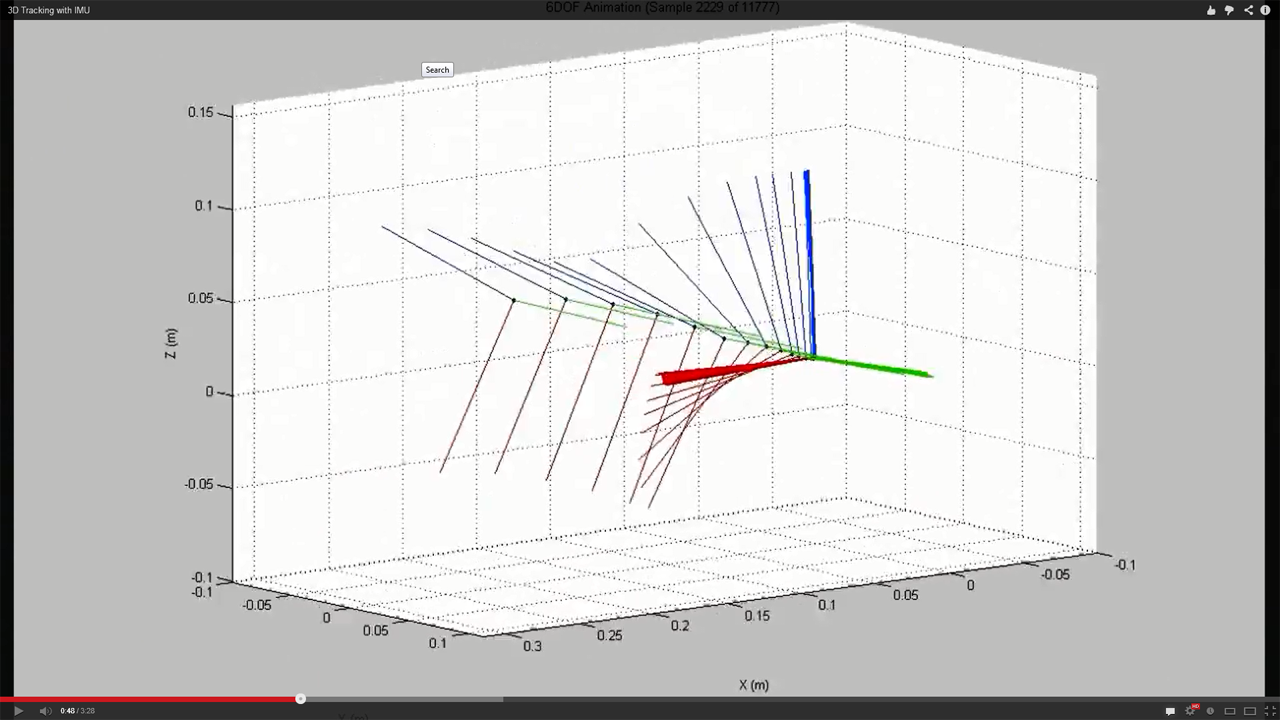
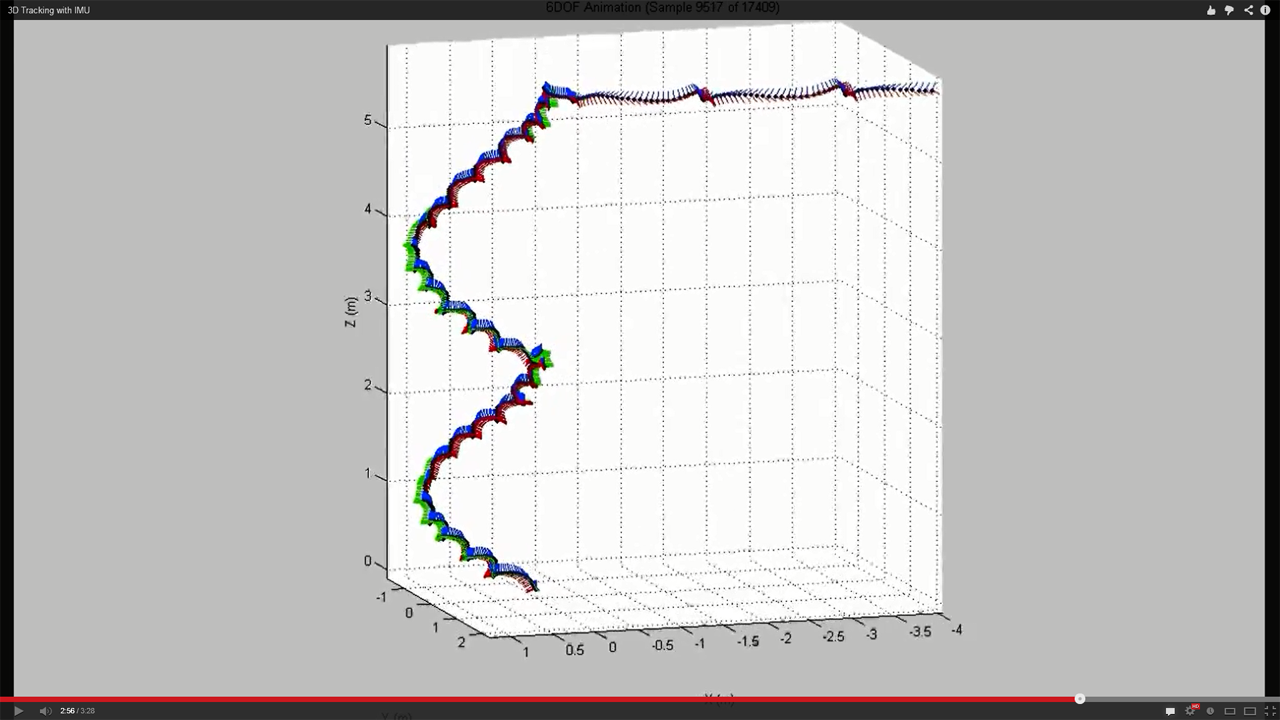
This is the source code for the foot tracking algorithm demonstrated in Seb Madgwick's "3D Tracking with IMU" video, originally uploaded to YouTube in March 2011. An x-IMU attached to a foot is be used to track position through dead reckoning and integral drift corrected for each time the foot hit the ground.
See the original post for more information.