Maintainer: Giseop Kim (paulgkim@kaist.ac.kr)
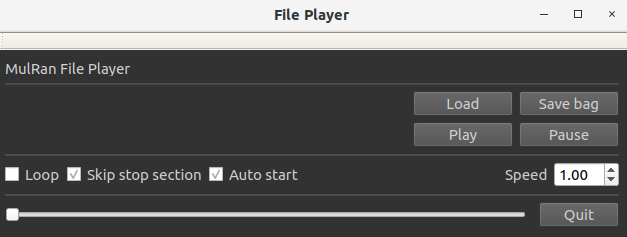
This program is a file player for the MulRan dataset.
- We now support compiling in the ros noetic environment. Instructions for installing from noetic can be found in the section below.
- We now support to generate a rosbag from the files. This is a contribution from Daniel Adolfsson and we are very grateful for his efforts (for the details: see The pull requests from @dan11003)
- Use the 'Save bag' button.
- Note
- Currently only Radar files are saved into a rosbag with ground-truth trajectory (not body frame, but UTM coordinate) as Odometry topic. Later, we plan to support lidar, imu, and gps topics as well as the radar files in a single rosbag.

- We released IMU and GPS data (consumer-level), as well as the originally delivered LiDAR and radar data.
- The model specification and the extrinsic calibration (i.e., the sensor position within our car platform) is equivalent to our lab's other dataset (Complex Urban Dataset, IJRR 19), so please refer the paper.
- We expect these data supports GPS-aided radar researches, LiDAR-IMU fusion such as LIO-SAM (example video), or radar-imu fusion.
$ mkdir -p catkin_ws/src
$ cd catkin_ws/src
$ git clone -b [master, noetic] https://github.com/irapkaist/file_player_mulran.git
$ cd ../..
$ catkin_make
- If ROS version is melodic, please use a master branch. Ohteriwse, if ROS version is noetic, please use a noetic branch.
$ source devel/setup.bash
$ roslaunch file_player file_player.launch
- Then, you need to select a sequence directory via GUI.
- For the correct load, first you need to place the GPS, IMU, LiDAR, and radar files in a directory following this structure (see this guide video)
- IMU and GPS files (.csv) must be located at the same directory of "data_stamp.csv"
- Jinyong Jeong: The original author
- Minwoo Jung: made the player system compatible with LIO-SAM input (i.e., supports ring information of a lidar scan)