

Packages for simulating Motoman Motomini in Gazebo and RViz
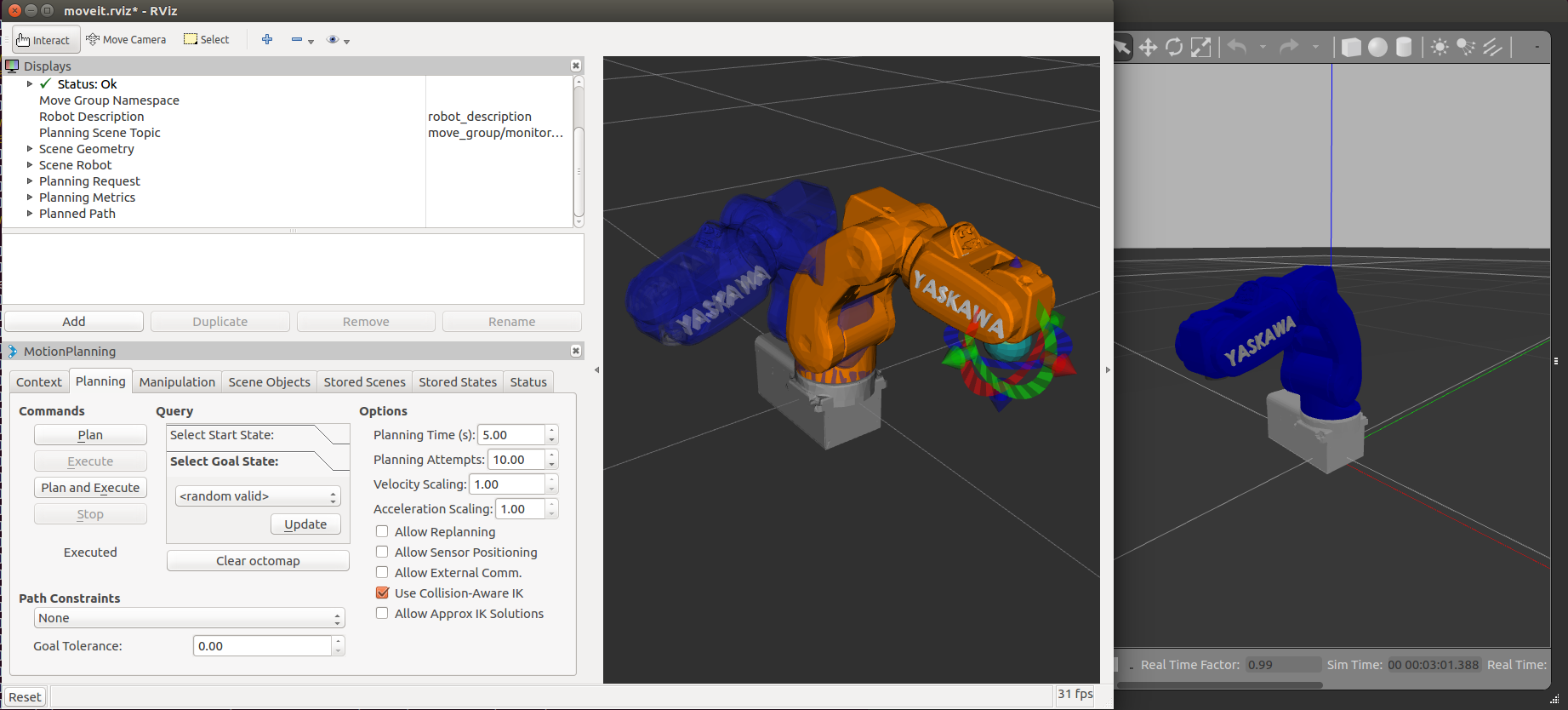 Click the above picture to view demo in YouTube.
Click the above picture to view demo in YouTube.
roslaunch motoman_motomini_control simulate_with_moveit.launchTo send joint trajectory command by rqt topic publish (/yk/target_joint_data)
rosrun motoman_motomini_control motomini_movegroup_controlThis is customized for the AWS robomaker demo in iREX2019. Will need more instructions.
roslaunch mqtt_monitor mqtt_yk_monitor.launch is_sim:=trueNote: motoman_motomini_support is cloned from ROS-Industrial link, and I add Yaskawa logo on its forth joint (for demo purpose).
In addition, currently, this package only for simulation (I remove dependecy of motoman_driver).