
This repository contains software, firmware and hardware to operate a commercial cartpole robot. It provides integration with Neural Control Tools. The cartpole robot producer and developers of this repository are independent parties hence we cannot guarantee the compatibility with future versions of the robot.
- Hardware Neural Control of CartPole and F1TENTH Race Car
- RPGD: A Small-Batch Parallel Gradient Descent Optimizer with Explorative Resampling for Nonlinear Model Predictive Control
-
USB interface to a PC
-
Support for original STM but also for Zybo Z7-20
-
Integration with tailored Cartpole Simulator and tools for system identification with neural networks and control.
-
Various control modes
- Control from PC: PID, MPC and neural controller
- Control from STM: PID
- Control from Zybo Z7-20: PID and FPGA-accelerated neural controller
All controllers can stabilize the pole in the upright position and follow target position. MPC and neural controller can also swing-up the pole.
-
Template with examples for programing experiment sequence for automated data collection.
-
Auxiliary functions allowing easier calibration of the robot, motor safety cut off, and more.
To operate cartpole, beyond the cartpole robot itself (see "Original setup" below), you need:
- If you want to use it with STM32:
- Make sure to buy cartpole with STM32 board.
- STM32 programmer (e.g. STLink or J-Link)
- If you want to use it with Zybo-Z7-20:
-
We are using Zybo-Z7 -20 board, and our current designs consumes over the half of the FPGA resources. With some additional optimization it should be possible to fit well performing neural controllers on even smaller Zynq chips. No matter if you switch to smaller or bigger board, you will probably need to adjust the design regarding input and output pins and buttons, LEDs and switches assignments.
-
You need to prepare the analog filter with voltage divider for angle (ADC) input and H-bridge for motor. See below for the details, here just list of items:
- 12V, 5A power supply for the motor (usually comes with the cartpole robot)
- 2 x Pmod TPH2 (12-pin Test Point Header), we use it to solder H-bridge and analog filter on it
- H-Bridge: Pololu TB6612FNG Dualer Motortreiber
- 1 x Ferrite bead, we took just what we had in house to clean power supply for potentiometer
- Capacitors:
- 1 x 1uF for filtering angle signal from potentiometer (RC time constant = 0.1 ms; you can adjust this one)
- 1 x 20uF and 1 x 4.7 uF for filtering power supply for potentiometer
- 1 x 470uF for filtering power supply for H-Bridge - probably facultative, just any big capacitor will do
- Resistors:
- 12 kOhm for voltage divider for potentiometer
- 100 Ohm for filtering angle signal from potentiometer (RC time constant = 0.1 ms)
- Some wires to solder connections
- Barrel connector for power supply to be soldered to H-Bridge
-
- Additionally, you might want to buy:
- Possibly a cable to connect the STM32 or Zybo board (micro USB) to PC, not sure if included with cartpole robot or Zybo. You probably want a rather long one for convenience (1-2m).
- Spare motor with Encoder - we use Pololu 19:1 Metal Gearmotor, 37Dx68Lmm, 12V with 64 CPR Encoder #4751
- Power supply for Zybo-Z7 board - 5V, 2.5A, barrel connector; the board can be powered also from USB.
- SD card and SD card reader - to flash Zybo board from it without need to connect to computer after start up (should be also possible to program the chip with flash memory on Zybo board, but we did not test it)
- Spare STM boards if you want to work mostly with them - they seem to be fragile
- metal bars for experiments with poles of different mass and length - we had these in-house so you have to find on your own where to buy them. With a rough measurement the pole mounting hole is 6mm in diameter, the pole is 5.7mm in diameter.
- Some material to decorate the cartpole - don't forget the artistic side of the project! ;-)
We bought our cartpole robot on AliExpress.
As of today there are a few links to the product e.g. this.
It is worth to search for "inverted pendulum" on AliExpress to find the cheapest option and compare with the picture below.
Out of different versions we have the one using STM32 (ST32F103C8T6) board. Not the one with Arduino.
If you plan to use Zybo-Z7-20 instead, you might be fine buying just the mechanical part of the robot
(but probably need to buy power supply for the motor separately in such a case).
 .
.
The belt tension is crucial for the cartpole to work properly. Unfortunately we have no method to quantify it. It should be tight enough to prevent the belt from slipping on the motor pulley, but not too tight not to cause too much lateral force on the motor. It seems to work best if when I push down the upper part of the belt with my finger, I can touch the lower part of the belt and it gets tense when I do it.
As the replacement of the original motor
we use Pololu 19:1 Metal Gearmotor, 37Dx68Lmm, 12V with 64 CPR Encoder #4751.
This motor has a similar characteristics to the original one, but its connector has wires in different order.
For STM setup the original motor is the default, the Pololu needs additional "adapter".
This adapter is shown below:

TODO: As for my understanding same adapter (up to the male-female reverse endings) would do to port original motor to Zybo-Z7-20. I have not tried this yet. In this case the end with the white tape should be on the Zybo side - all the cables keep their color-indicated meaning as on the picture - and the other end connected to motor taking care that the wiring is as if it were connected directly to the stm board.
You can notice that the polulu motor with the adapter has still the reversed sign of the encoder signal. We use this feature in the calibration to distinguish the motors: while applying the same voltage to the motor, the encoder signal should have the opposite sign for the Pololu motor.
Unfortunately the Digilent h-bridge PMODs does not meet specification of the cartpole motor.
The original setup with STM32 uses TB6612FNG H-brdige.
We bought it as Pololu TB6612FNG Dualer Motortreiber
and build our own PMOD H-Bridge by soldering it to Pmod TPH2.
Below hopefully self-explanatory picture on how to prepare the h-bridge.
The PMOD should be connected to the Zybo's JE PMOD connector, the other end should be connected to the motor.
The colors of the wires on the picture match the colors of the wires at the Pololu motor connector.
The barrel connector is for motor supply (12V, 5A).

To get a clean angle measurement from the potentiometer, we designed an analog filter.
We also need a voltage divider as the board delivers 3.3V to the potentiometer
and ADC (XADC) on Zynq operate in the range 0-1V.
The potentiometer output is read from PIN 3 of PMOD connector JA on Zybo Z7-20.
The schematic is provided below:

Below some picture to facilitate the assembly.

Visible capacitor is 1uF for filtering angle signal from potentiometer. It is place so that it can be easily replaced with different value to adjust the filter's time constant. Also visible a lot of glue to keep the connection stable when the cartpole is moving.
 From top to bottom visible is the ferrite bead,
the 20 uF capacitor filtering potentiometer input
and connection shorting pin 9 to ground (the last one just because haw we placed the circuits).
The remaining resistors and capacitor are hidden under heat shrink tube.
From top to bottom visible is the ferrite bead,
the 20 uF capacitor filtering potentiometer input
and connection shorting pin 9 to ground (the last one just because haw we placed the circuits).
The remaining resistors and capacitor are hidden under heat shrink tube.
-
Create python 3.11 environment, if you haven't done it yet. e.g.
conda create -n CPP python=3.11conda activate CPPconda install pipWhere CPP is the name of the environment (stands for CartPole Physical).
-
Clone the repository
git clone https://github.com/SensorsINI/physical-cartpole -
Install the dependencies
pip install -r requirements.txtThis installs all the dependencies - it is quite a lot of packages, so it may take a while.
-
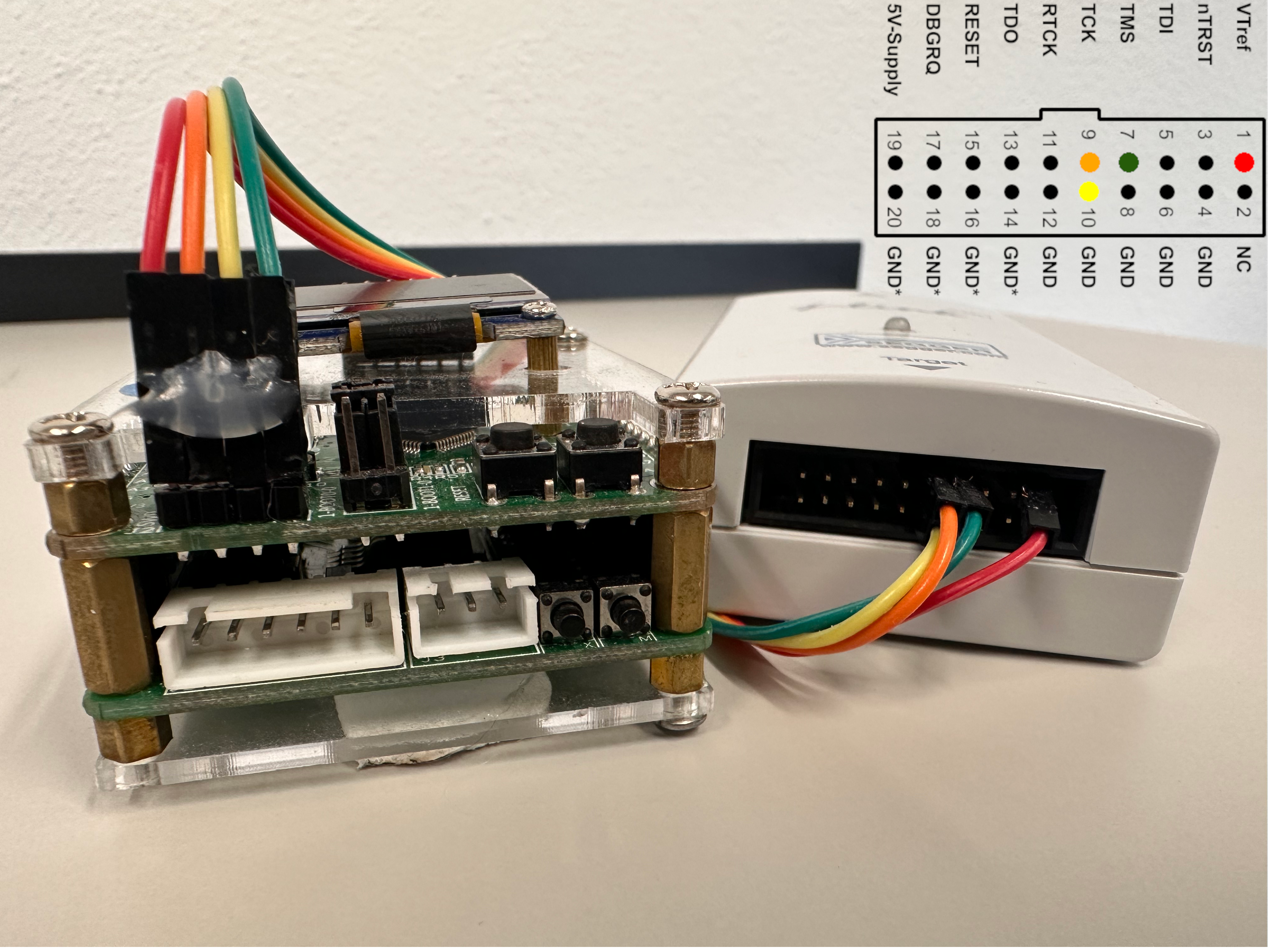
Connect the STLink or the J-link to the STM32 board and to the PC. For j-link we attach the picture, for st-link, you have to figure it out on your own.
-
Open STM32CubeIDE and go to
File -> Import... -> Existing Projects into Workspaceand import project from Firmware/FactoryFirmware CubeIDE. -
Go to hardware_bridge.h and comment out
#define ZYNQand uncomment#define STM. -
Build the project (hammer icon).
-
Right click on the project and select
Run As -> STM32 C/C++ Application. Go toDebuggertab and set up your J-link or ST-link. For us it looks as follows: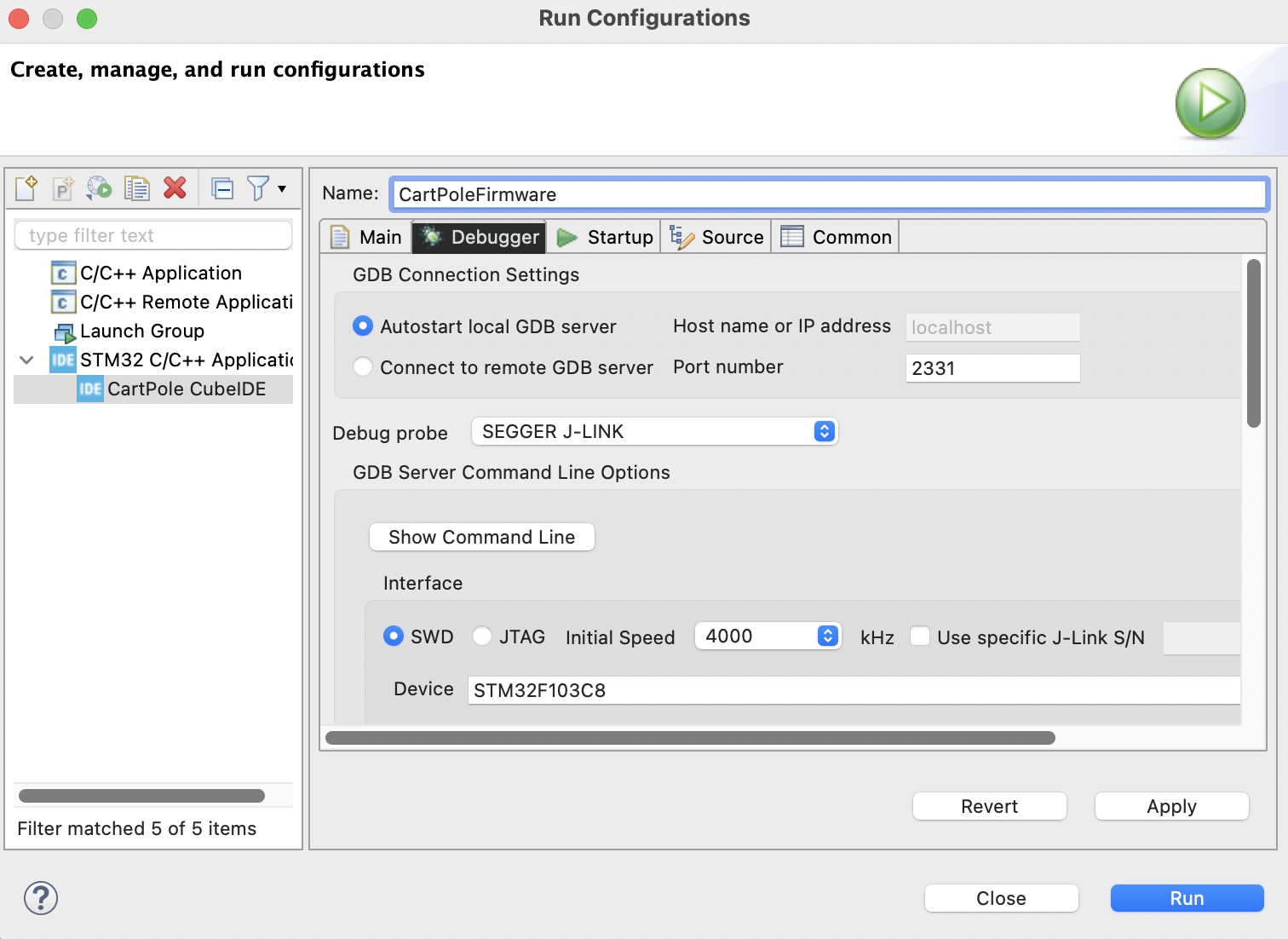
-
Run the project. The firmware should be loaded to the STM32 board. For STM board, the firmware is saved in the flash memory, so you do not need to load it every time you start the board. This also means that the original firmware will be overwritten, so if you intend to use it later, make sure to fetch it from the chip and save.
-
Open
Driver/globals.pyand setCHIPvariable toSTM


-
The project is configured to work with ZYNQ as default after download. In case you used it first with STM, you need to undo the relevant changes:
- Go to hardware_bridge.h and comment out
#define STMand uncomment#define ZYNQ. - Open globals.py and set
CHIPvariable toZYNQ
Otherwise you can ignore this first point.
- Go to hardware_bridge.h and comment out
Do the steps as described in Set up and installation section.
The main module to control the cartpole from PC is control.py.
Parameters are in globals.py.
To get working controllers you first need to calibrate the cartpole.
There are mainly three things which need to be calibrated:
- middle of the cartpole track
- motor power
- vertical angle
There is also a friction which might play an important role in cartpole modeling and control, but you should be able to get a working controller without adjusting it. Hence for friction, see the wiki page.
This is the only calibration value that is not hardcoded and needs to be recalibrated each time cartpole is powered on.
After starting the python program to drive cartpole from PC,
press Shift+K.
The cartpole will move to the left and right boundary of the track.
and stop in the middle.
If the cartpole get stuck it might mean that the motor power is too low to overcome friction. This usually happens just before stopping in the middle (as it slows down not to overshoot), hence it might be confusing - the cartpole seems in the middle but PC is still waiting for the calibration to finish. In this case you need to increase it in calibration function in firmware.
If you are running multiple dozens of experiments, you might want to recalibrate the cartpole from time to time.
The calibration also allows cartpole to distinguish between the original and the Pololu motor, see Motors subsection of Hardware section.
Take care! The default motor is hardcoded independently in firmware and in the python program. When starting python program, the motor value from software is sent to the board and overwrites the value in firmware. If you run calibration from python program, this value will be overwritten for both software and firmware control. If you run calibration with button press from the board, the value in firmware will be overwritten but not in the python program. After restarting the board or python program, the motor selections is reset to its respective hardcoded default value.
TODO: Can we make the motor value management simpler?
In our lab we have two cartpole robots, one with the original motor and one with the Pololu motor. Setting the motor type identifies the robot instance and determines parameters which are not dependent on motor: ANGLE_HANGING_POLOLU, ANGLE_HANGING_ORIGINAL. I.e. for what reading of the potentiometer the pole is hanging vertically, which is different for each robot.
FIXME: Calibration with STM not running now.
Each motor has a bit different power characteristics. Additionally, the power might change with time. Hence, we try to determine the relation between the motor power and the cartpole acceleration. We do it based on the saturation velocity, during the step response experiment. The experiment script is in step_response_experiment.py The scripts for this calibration are in MotorAndCartFriction
-
Start the cartpole control software (control.py)
-
Calibrate (
Shift+K) -
Press
muntill you see in terminal:Loading step-response experiment protocol! -
Press
nto start the step response experiment.The cartpole will accelerate a few time to the left and to the right.
Potential issues:
- If the minimal speed it too low the cart might get stuck due to friction. You can either very, very gently push it (not to skew the measurement) or increase the minimal speed in experiment script.
-
As soon as the cartpole stops, the data will be saved in the Driver/ExperimentRecordings folder (does not exist until you record first data).
-
Copy the data to the Driver/DataAnalysis/MotorAndCartFriction folder.
-
Open Driver/DataAnalysis/MotorCalibration.py You will find there detailed explanations how the calibration coefficients are calculated. Change variable
FILE_NAMEto the name of the file with the data and run the script. You will see the plot of the saturation velocity vs. motor power and calibration coefficients in the terminal. Copy the calibration coefficients to the globals.py (MOTOR_CORRECTION_ORIGINAL or MOTOR_CORRECTION_POLOLU) and in firmware to parameters.c (MOTOR_CORRECTION).
FIXME: MotorCalibration returns NaN now.
The potentiometer has a dead zone between 0 and max value. To minimise how it interferes with the control, we set the dead zone to the position when the pole is horizontal, with the hope this the state not crucial for control and which the pole is usually passing rarely & quickly. We place it to the left, but all should work if you place it to the right. To change it
- Run the cartpole control software, you will see the raw angle reading in the terminal.
- While holding the pole in the horizontal position, use a screwdriver to rotate the joint on which it is mounted until you find the dead zone. If necessary loose a bit the screw holding the pole to the potentiometer - and if not necessary tighten it afterwards! Otherwise the angle reading might drift!
Although the ADC is 12-bit, which would correspond to 4096 units per full circle,
due to the dead zone the full circle corresponds to more units.
To determine how many units corresponds to the full circle,
gently balance the pole up and down and note the difference in ADC reading.
The full circle is then double this value.
You can use my script in Driver/DataAnalysis/AngleUpDown
or do this simple measurement evaluation on your own.
While running to cartpole software you can press b
to measure the angle multiple times and get more precise results.
Insert the result in globals.py in ANGLE_360_DEG_IN_ADC_UNITS
FIXME: This should depend on both the motor (different robot = different potentiometer)
and the chip (Zynq setup uses voltage shifter which is generally not 100% precise).
FIXME: Too complicated! In firmware there is no ANGLE_360_DEG_IN_ADC_UNITS instead currently you need to read out angle and position normalization. Currently you can read this varable only if running the software in debug mode. In firmware in parameters.c in ANGLE_360_DEG_IN_ADC_UNITS.
To get a rough estimation you can let the pole hang down and note the angle reading.
To get more precise measurement press b.
Fill it in ANGLE_HANGING_ORIGINAL or ANGLE_HANGING_POLOLU in globals.py.
Rerun the cartpole software and very gently balance the pole up
and make sure that the angle reading is oscillating around 0.
If it is not (probably it is not),
adjust the value in globals.py by trial and error and rerun the software.
BRAVO! You have calibrated the cartpole! And I am done with writing this section! Now a more fun part - control!
After you have calibrating your cartpole and hardcoded the respected values in firmware You can also control the cartpole without connecting to PC at all. We however strongly recommend that you first make sure that the cartpole is working properly with PC control also regarding firmware controllers - it is much easier to debug!
STM32 board has 2 buttons on top. The reset button reloads the firmware. TODO: The USER button switches the firmware PID on and off. While switching it on it first calibrates the cartpole. Please keep the pole vertical during the calibration - the PID control starts immediately after the calibration! The PID cannot swing-up the pole, and it will crash the cart into track boundaries, if it starts with the pole not roughly vertical. As the PID is not our main focus, it is by far not as well tuned as the PID originally shipped with the cartpole.
The pendulum microcontroller firmware has two modes of operation:
(1) Self-Contained Mode
In this mode, the pendulum is controlled directly by the firmware
using an onboard basic PD control scheme.
A PC is not required at all for this mode.
However you can use the PC to adjust the control parameters on-the-fly,
as well as read out set points and other useful values
generated by the on-board control algorithm in real time.
If you want 'factory mode', just boot up the controller and set it running.
(2) PC Control Mode
In this mode,
the pendulum firmware runs as an interface to the physical hardware.
Control is performed over USB by an algorithm running on another connected device (PC, FPGA, etc).
The firmware outputs the current pendulum angle and cart position at regular intervals,
and accepts motor speed and direction as input.
The frequency of the control loop running on the PC is governed by the period set for outputting angle/position from the pendulum micro (currently hardcoded to 5 ms).
In either mode, when enabling control of the pendulum for the first time, the firmware will automatically run a calibration routine. During this routine, the cart will slowly move from left to right in order to determine the maximum limits of movement.
Two buttons are used by the firmware
S1
This is the CPU's hard reset.
S2
Used to switch between the 2 modes of operation in the pendulum firmware.
There is a blue LED (L2) that flashes periodically, fast or slow depending on which mode the firmware is operating in. Fast (200 ms period) -> Self-contained mode. Slow (1 s period) -> PC control mode.
The interface to the pendulum firmware is through the pendulum.py module, which provides a series of high-level functions to configure and command various things on the microcontroller. control.py contains an example implementation of a PD controller running the PC and interfacing directly with the pendulum firmware.
Parameters that can be adjusted via the PC are listed below. Note that raw values are used for set points and control gains.
- Angle set point (~3110 is vertical).
- Angle average length (number of samples to average over when determining current angle).
- Angle smoothing factor (0 to 1.0 - used in 1st order low-pass filter).
- Angle control gains (P and D).
- Position set point (0: centre, <0: left, >0: right).
- Position control period (as a multiple of Angle control period - 5 ms).
- Position smoothing factor (0 to 1.0 - used in 1st order low-pass filter).
- Position control gains (P and D).
If enabled, the following data is streamed to the PC at regular 5 ms intervals:
- Current pendulum angle.
- Current cart position.
- Motor speed command calculated by onboard controller (0 when running in PC-control mode).
The zynq folder has the Vivado and Vitis projects for both Zybo and Zedboard boards. The Xilinx tools version is 2021.2. To replicate the projects you need to install Vivado (including Vitis) following the installation guides Vivado
Open Vivado tool and click on the TCL console tab. This tab is place at window bottom. Navigate to zynq folder:
cd path/to/zynq/folderThen run the tcl script using the next command:
source ./zybo.tclThe vivado project will be create and it will be ready for synthesis. Yo can modify this project according your needs.
Vitis projects are compressed in zybo_vitis_pot_motor_test.zip file. So to import then into Vitis follow the next steps:
- Open Vitis using a new workspace
- Click on File -> Import...
- Select "Vitis project exported zip file" option
- Browse zybo_vitis_pot_motor_test.zip file
- Select all the projects
- Click Finish
The projects are ready to be run in the Zybo board.
sys.stdin.read(1) which is used for keyboard input causes the debugger of Pycharm to hang.
For USB-UART bridge if you use FTDI chip - not the case for original stm board, but a default bridge for Zybo board or PMODs you will get 16ms latency due to FTDI chip waiting for minimal number of bytes to transfer to PC. You can disable this feature programmatically.