by Delong Zhu at Robotics, Perception, and AI Laboratory, CUHK
A more efficient and accurate model, Cascaded OCR-RCNN, is available now !!! The large-scale dataset will also be available soon!
OCR-RCNN is designed for elevator button recognition task based on Faster RCNN, which includes a Region Proposal Network (RPN), an Object Detection Network and a Character Recognition Network. This framework aims to help solve inter-floor navigation problem of service robots.
In this package, a button recognition service is implemented based on a trained OCR-RCNN model. The service takes a raw image as input and returns the detection, localization and character recognition results. Besides, a Multi-Tracker is also implemented, which utilizes the outputs of recognition service to initialize the tracking process, yielding an on-line detection performance.
If you find it helpful to your project, please consider cite our paper:
@inproceedings{zhu2018novel,
title={A Novel OCR-RCNN for Elevator Button Recognition},
author={Zhu, Delong and Li, Tingguang and Ho, Danny and Zhou, Tong and Meng, Max QH},
booktitle={2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={3626--3631},
year={2018},
organization={IEEE}
}
- Ubuntu 14.04
- ROS indigo
- TensorFlow 1.4.1
- OpenCV 3.4.1
- compiled with OpenCV's extra modules
- GPU: GTX Titan X
- with a total memory of 12288MB
- Download the OCR-RCNN model and put it in the folder
elevator_button_recognition/src/button_recognition/ocr_rcnn_model/ - Run
cd elevator_button_recognitionand runcatkin_init_workspace - Run
catkin_make -j[thread_number] - Run
source elevator_button_recognition/devel/setup.bashor add the command to '~/.bashrc' - (Optional) add the path of ocr-rcnn mode to launch file at
elevator_button_recognition/src/button_recognition/launch - (Optional) add the path of test samples to launch file at
elevator_button_recognition/src/button_tracker/launch
- If
image_only == true, three panel images insrc/button_tracker/test_sampleswill be tested. - If
image_only == false, a video insrc/button_tracker/test_sampleswill be tested.
- Run
roslaunch button_recognition button_recognition.launchto launch the recognition service, which recieves asensor_msgs/CompressedImageas input and return arecog_result(self-defined) type of response. - Run
roslaunch button_tracker button_tracker.launchto launch the tracking node, where the recognition service is called to initialize a 'Multi-Tracker`.
- The simplest KCF tracker is used in this implementation.
- Change the multi-tracker to single-tracker will further increase the processing speed.
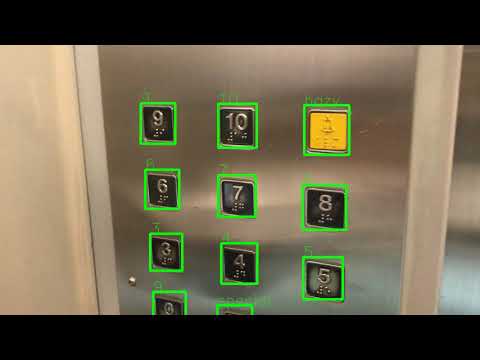
- Two demo-images are listed as follows. They are screenshots from two Youtube videos. Recognition results are visualized at the center of each bounding box.
 Image Source: [https://www.youtube.com/watch?v=bQpEYpg1kLg&t=8s]
Image Source: [https://www.youtube.com/watch?v=bQpEYpg1kLg&t=8s]
 Image Source: [https://www.youtube.com/watch?v=k1bTibYQjTo&t=9s]
Image Source: [https://www.youtube.com/watch?v=k1bTibYQjTo&t=9s]
- Two demo-videos are also provided. The first one is a composition video, where each frame is processed off-line, then composed to a complete video. This video shows us the recognition performance of OCR-RCNN in an untrained elevator. The second one is a real-time video, where the OCR-RCNN and a
Multi-Trackeris utilized to carry out on-line recognition task. As we can see, although the tracker can help increase the recognition speed, its accuracy and robustness are worse than the off-line version. So, it is crucial to further improve the OCR-RCNN's time efficiency in the next stage!