Open Robot Actuator Hardware
Click on the pictures below for more information
| TI Evaluation Boards |
BLMC µDriver |
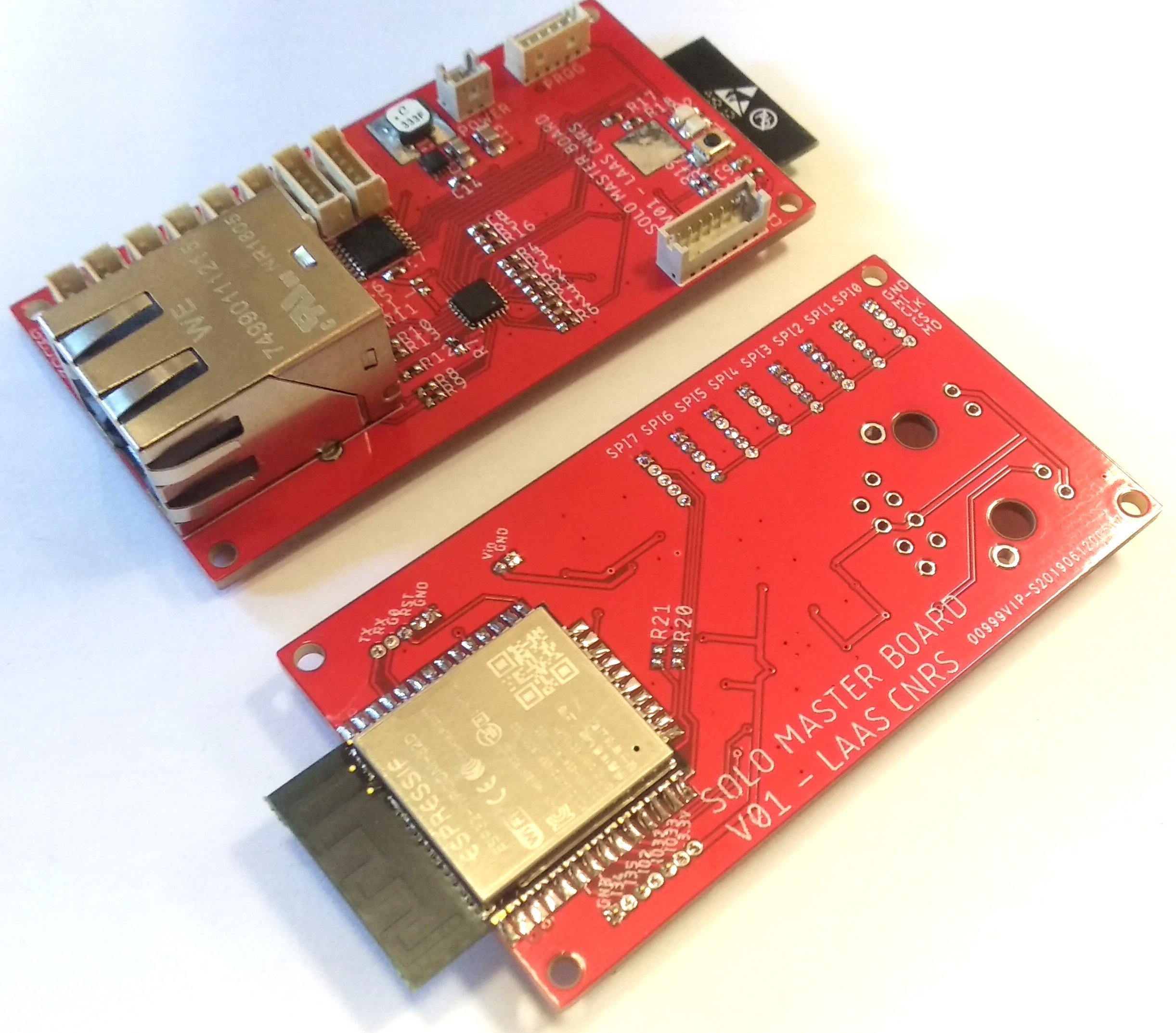
Master Board |
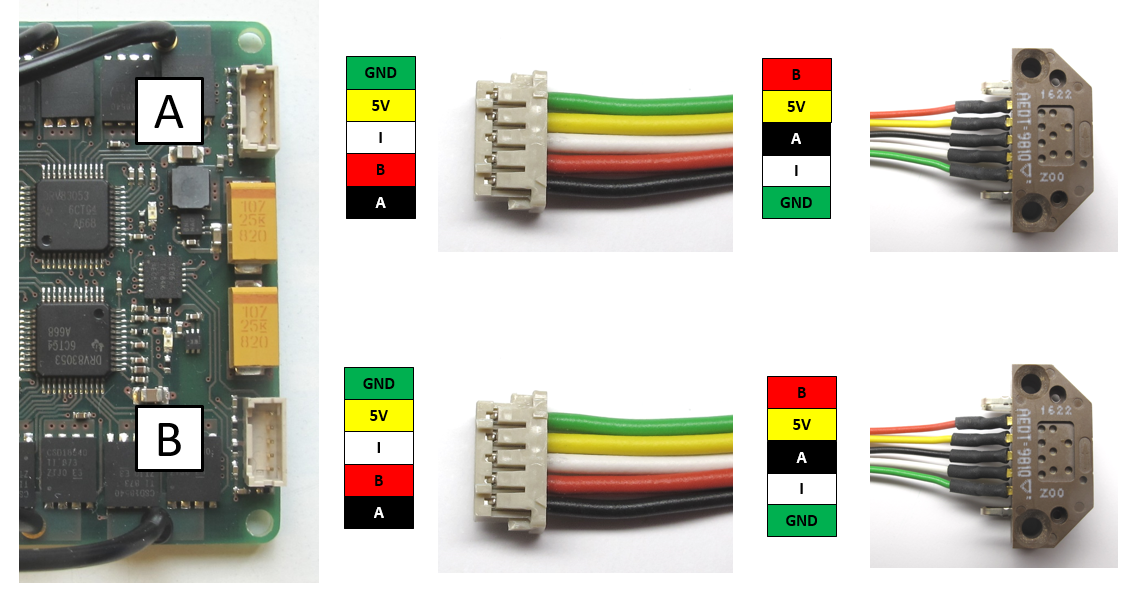
Details Wiring |
 |
 |
 |
 |
| Quadruped 8dof v2 |
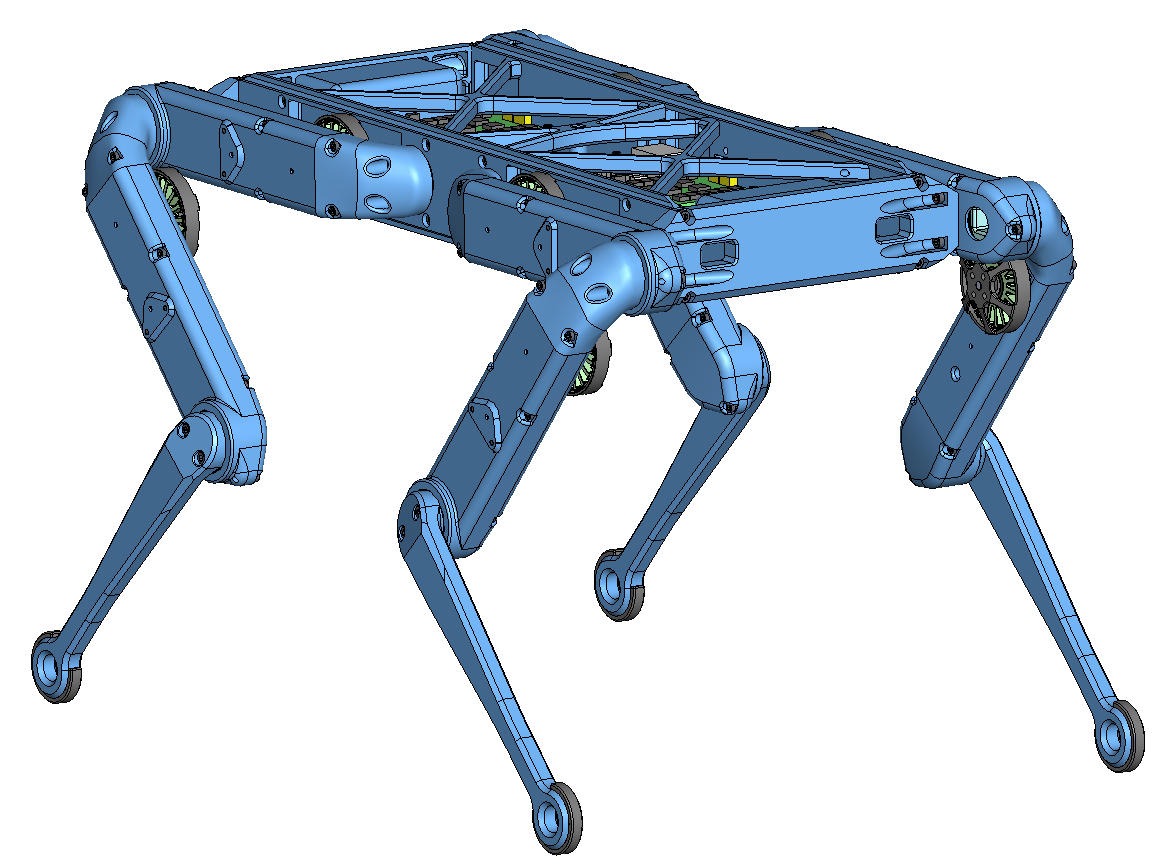
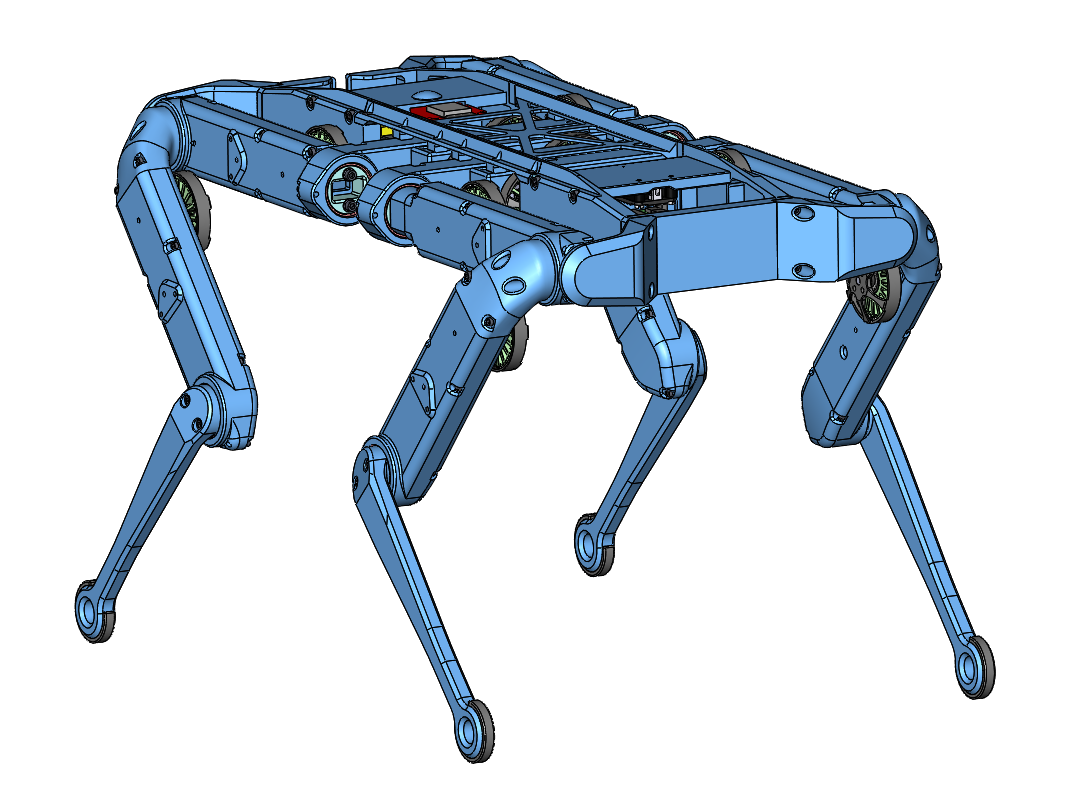
Quadruped 12dof |
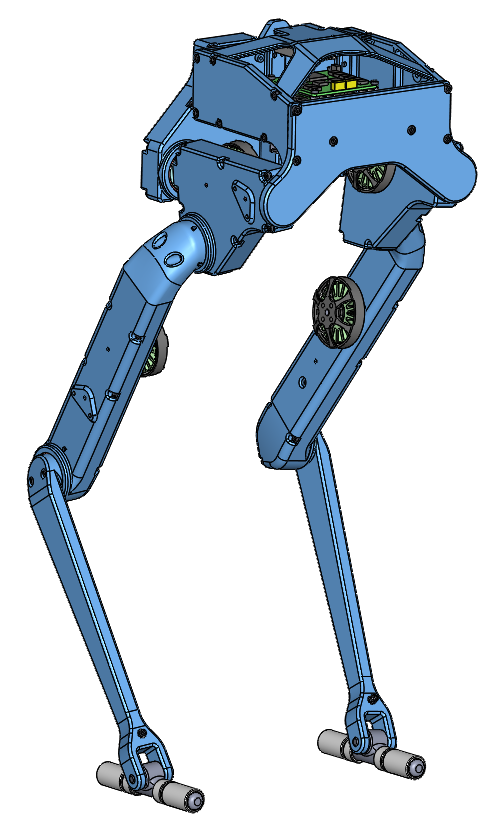
Biped 6dof |
TriFingerEdu |
 |
 |
 |
 |
| 2dof Leg v2 |
3dof Leg |
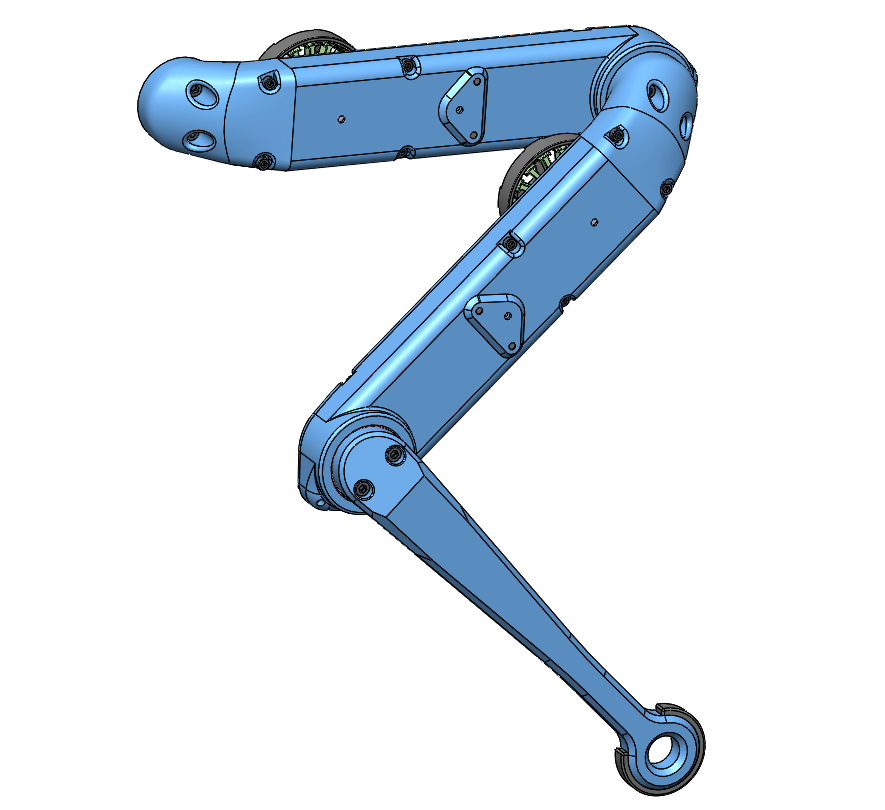
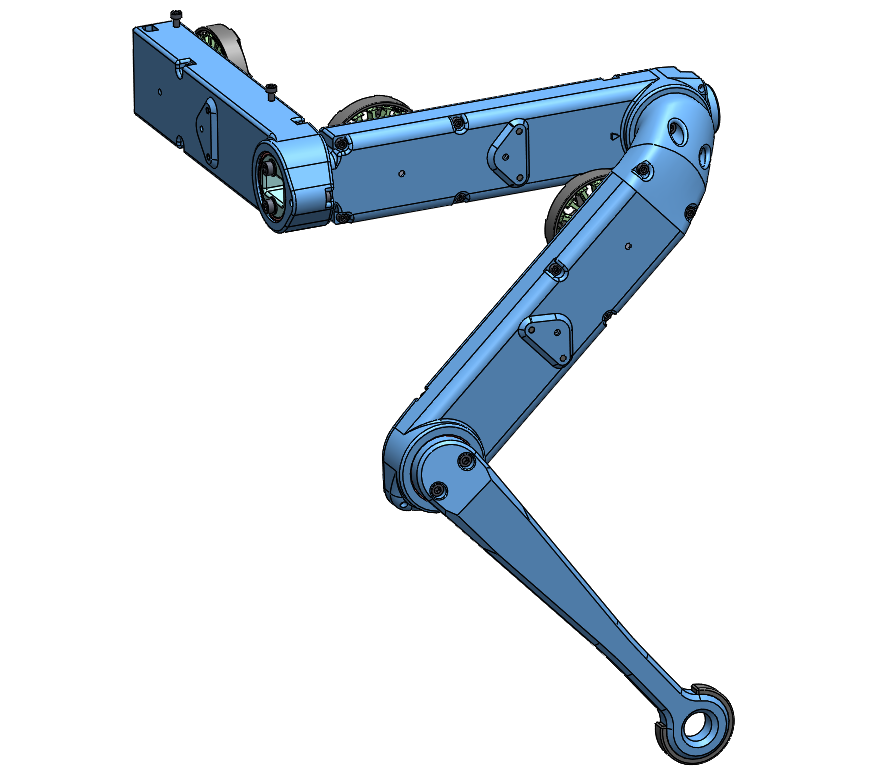
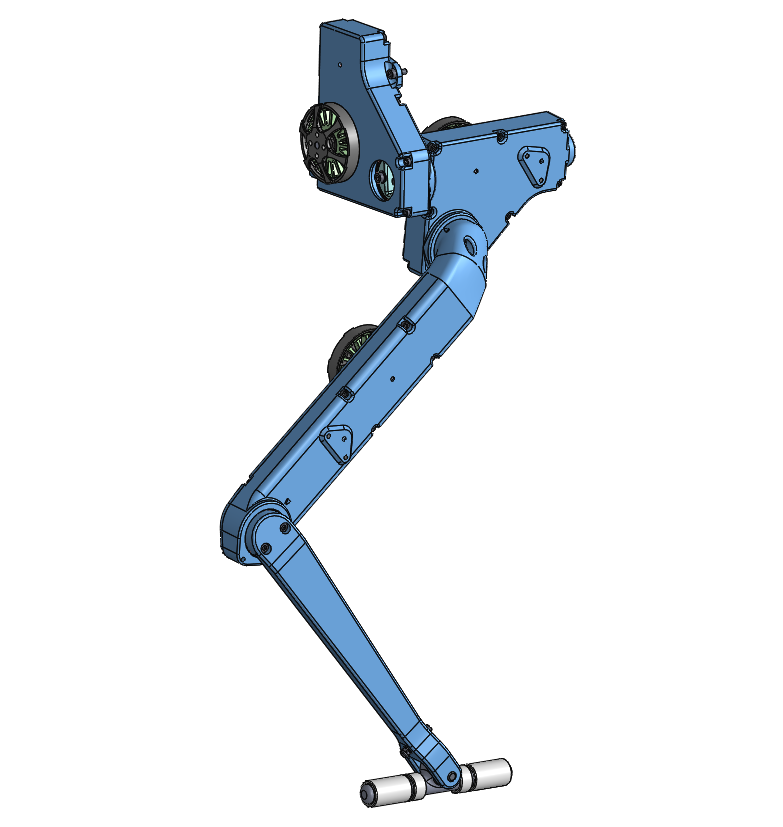
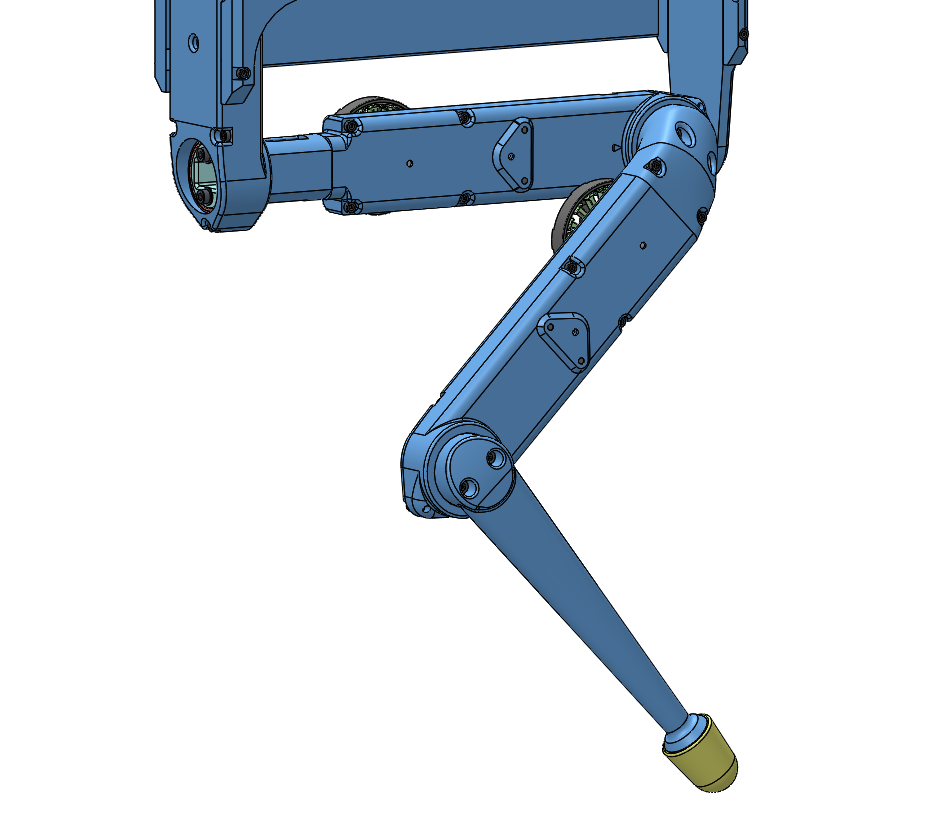
Biped Leg |
FingerEdu |
 |
 |
 |
 |
| Actuator Module Core v1 |
Actuator Module Core v1.1 |
Details 3d Printed Parts |
Details Machined Parts |
 |
 |
 |
 |
Quadruped 12dof v1.1
Autonomy Upgrade |
Leg Test Stand v2 |
NYU Finger |
Dual Motor Testbed |
 |
 |
 |
 |
| Mechanical Tools and Consumables |
Electronic Components and Tools |
Details Electronics
Quadruped Robot 12dof |
Lower Legs |
 |
 |
 |
 |
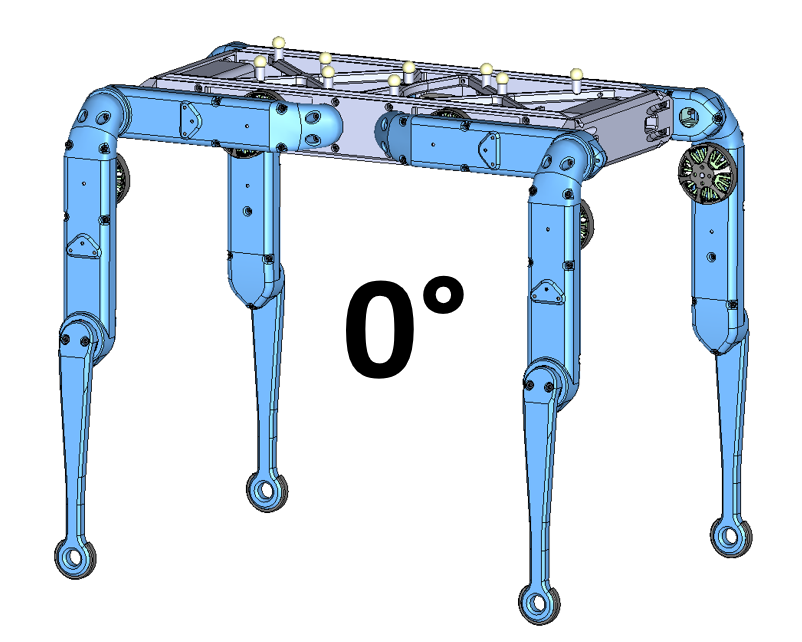
| Robot Calibration |
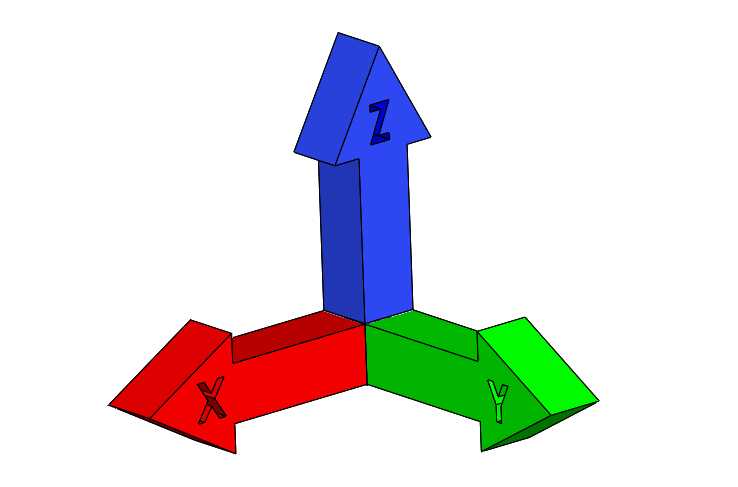
Conventions |
Known Issues |
|
 |
 |
 |
 |
Step-by-Step Instructions
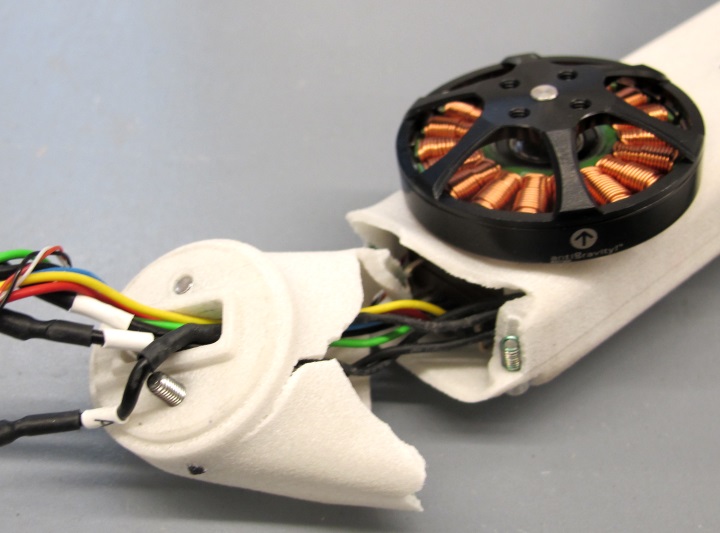
| Motor Preparation |
Motor Shaft Preparation |
Encoder Preparation |
Center Pulley Preparation |
 |
 |
 |
 |
| Output Pulley Preparation |
Shell Preparation |
Actuator Module Assembly |
Actuator Module Testing |
 |
 |
 |
|
Old Versions for Reference
| Quadruped 8dof v1 |
2dof Leg v1 |
Leg Test Stand v1 |
Foot Contact Switch |
 |
 |
 |
 |
Open Dynamic Robot Initiative - Webpage
Open Dynamic Robot Initiative - YouTube Channel
Open Dynamic Robot Initiative - Forum
Open Dynamic Robot Initiative - Paper
Hardware Overview
Software Overview
Jonathan Fiene
Thomas Flayols
Felix Grimminger
BSD 3-Clause License
Copyright (c) 2019-2021, Max Planck Gesellschaft and New York University