NUS ME5413 Autonomous Mobile Robotics Final Project
Authors: Christina Lee, Dongen Li, Yuhang Han, and Shuo Sun



- System Requirements:
- Ubuntu 20.04 (18.04 not yet tested)
- ROS Noetic (Melodic not yet tested)
- C++11 and above
- CMake: 3.0.2 and above
- This repo depends on the following standard ROS pkgs:
roscpprospyrvizstd_msgsnav_msgsgeometry_msgsvisualization_msgstf2tf2_rostf2_geometry_msgspluginlibmap_servergazebo_rosjsk_rviz_pluginsjackal_gazebojackal_navigationvelodyne_simulatorteleop_twist_keyboard
- And this gazebo_model repositiory
This repo is a ros workspace, containing three rospkgs:
interactive_toolsare customized tools to interact with gazebo and your robotjackal_descriptioncontains the modified jackal robot model descriptionsme5413_worldthe main pkg containing the gazebo world, and the launch files
Note: If you are working on this project, it is encouraged to fork this repository and work on your own fork!
After forking this repo to your own github:
# Clone your own fork of this repo (assuming home here `~/`)
cd
git clone https://github.com/<YOUR_GITHUB_USERNAME>/ME5413_Final_Project.git
cd ME5413_Final_Project
# Install all dependencies
rosdep install --from-paths src --ignore-src -r -y
# Build
catkin_make
# Source
source devel/setup.bashTo properly load the gazebo world, you will need to have the necessary model files in the ~/.gazebo/models/ directory.
There are two sources of models needed:
-
# Create the destination directory cd mkdir -p .gazebo/models # Clone the official gazebo models repo (assuming home here `~/`) git clone https://github.com/osrf/gazebo_models.git # Copy the models into the `~/.gazebo/models` directory cp -r ~/gazebo_models/* ~/.gazebo/models
-
# Copy the customized models into the `~/.gazebo/models` directory cp -r ~/ME5413_Final_Project/src/me5413_world/models/* ~/.gazebo/models
This command will launch the gazebo with the project world
# Launch Gazebo World together with our robot
roslaunch me5413_world world.launchIf you wish to explore the gazebo world a bit, we provide you a way to manually control the robot around:
# Only launch the robot keyboard teleop control
roslaunch me5413_world manual.launchNote: This robot keyboard teleop control is also included in all other launch files, so you don't need to launch this when you do mapping or navigation.

After launching Step 0, in the second terminal:
# Launch GMapping
roslaunch me5413_world mapping.launchAfter finishing mapping, run the following command in the thrid terminal to save the map:
# Save the map as `my_map` in the `maps/` folder
roscd me5413_world/maps/
rosrun map_server map_saver -f my_map map:=/map
Once completed Step 2 mapping and saved your map, quit the mapping process.
Then, in the second terminal:
# Load a map and launch AMCL localizer
roslaunch me5413_world navigation.launch
- You may use any SLAM algorithm you like, any type:
- 2D LiDAR
- 3D LiDAR
- Vision
- Multi-sensor
- Verify your SLAM accuracy by comparing your odometry with the published
/gazebo/ground_truth/statetopic (nav_msgs::Odometry), which contains the gournd truth odometry of the robot. - You may want to use tools like EVO to quantitatively evaluate the performance of your SLAM algorithm.
-
From the starting point, move to the given pose within each area in sequence
- Assembly Line 1, 2
- Packaging Area 1, 2, 3, 4
- Delivery Vehicle 1, 2, 3
-
We have provided you a GUI in RVIZ that allows you to click and publish these given goal poses to the
/move_base_simple/goaltopic: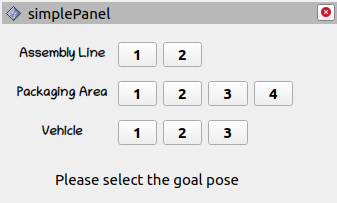
-
We also provides you four topics (and visualized in RVIZ) that computes the real-time pose error between your robot and the selelcted goal pose:
/me5413_world/absolute/heading_error(in degrees, wrtworldframe,std_msgs::Float32)/me5413_world/absolute/position_error(in meters, wrtworldframe,std_msgs::Float32)/me5413_world/relative/heading_error(in degrees, wrtmapframe,std_msgs::Float32)/me5413_world/relative/position_error(in meters wrtmapframe,std_msgs::Float32)

You are welcome contributing to this repo by opening a pull-request
We are following:
The ME5413_Final_Project is released under the MIT License