Experimentation with the python Dash library: v3.0 snapshots of work processes.
| clearing_data_exploration |
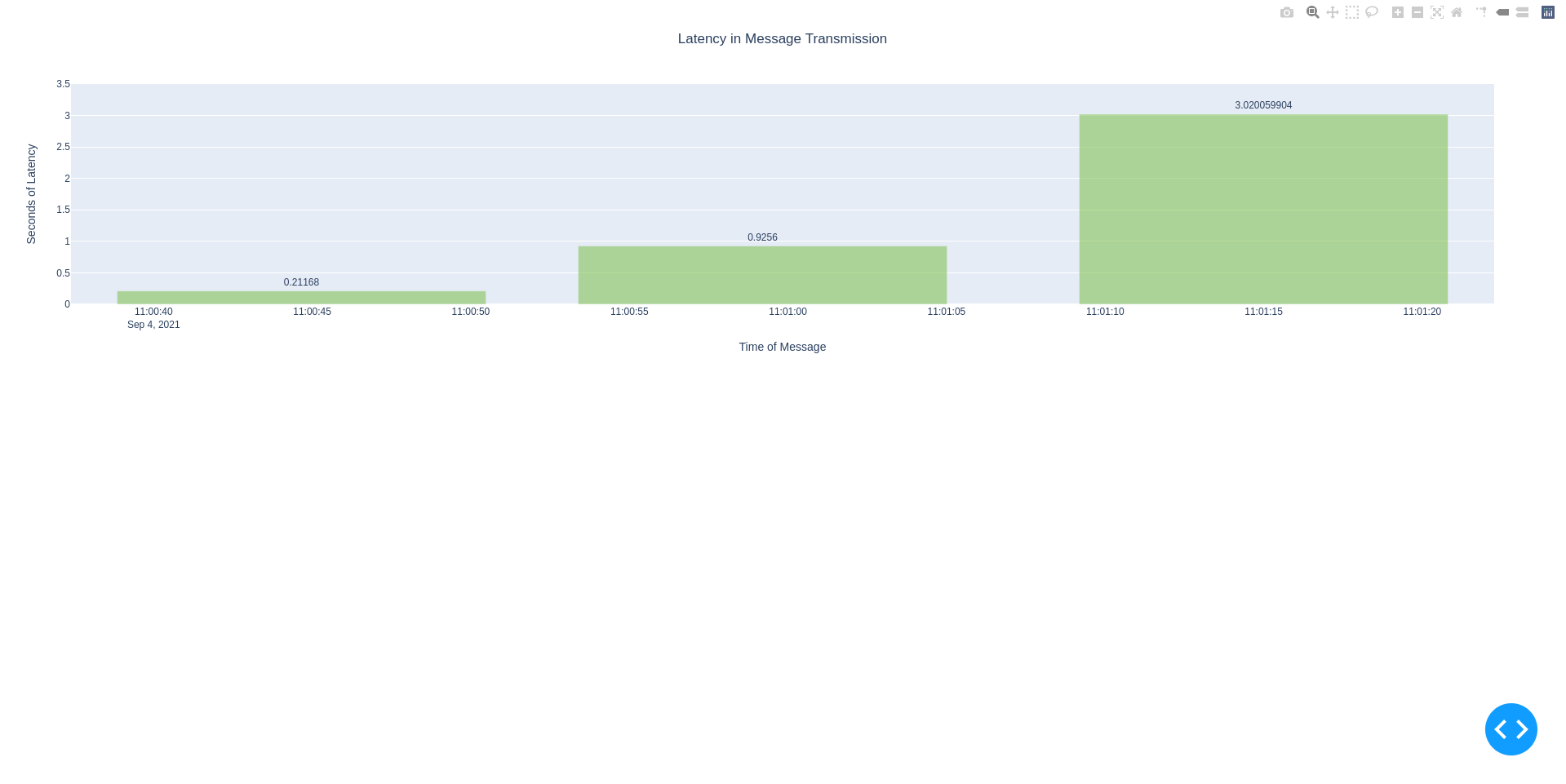
AT_realtime_bar |
 |
 |
| First few tests onboarding the Pixhawk on a random drone. |
Final field tests with the home-built drone. |
Custom dashboards, including one for the Flight Arena:
| WEB_arcade_dashboard_1(1) |
WEB_arcade_dashboard_1(2) |
.png) |
.png) |
| Measures of latency on the Flight Arena. Thesis-related. |
Hover tests on the Flight Arena. |
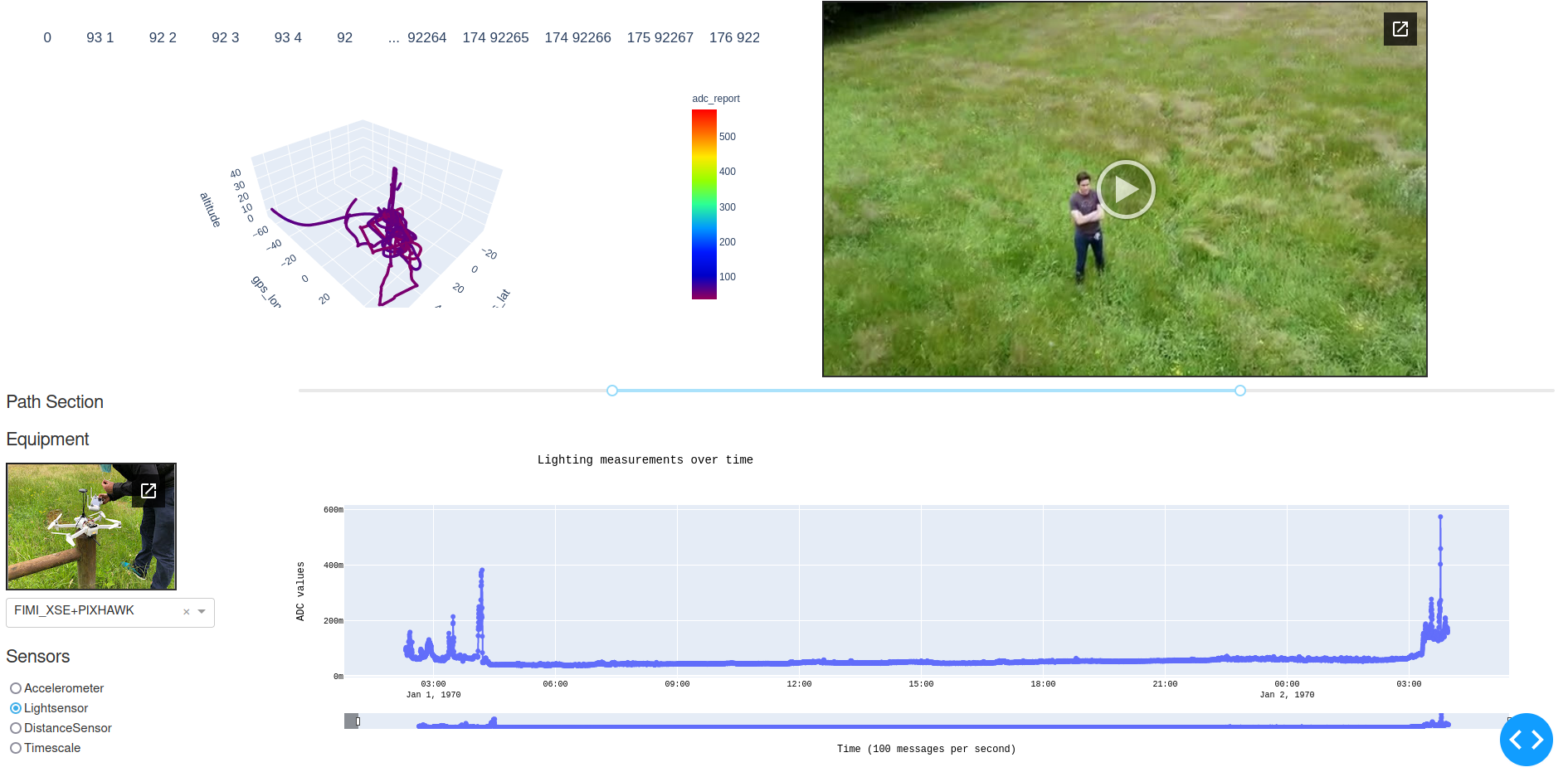
Complete sensor dashboard:
| invivo_dashboard_1(1) |
invivo_dashboard_1(2) |
.png) |
.png) |
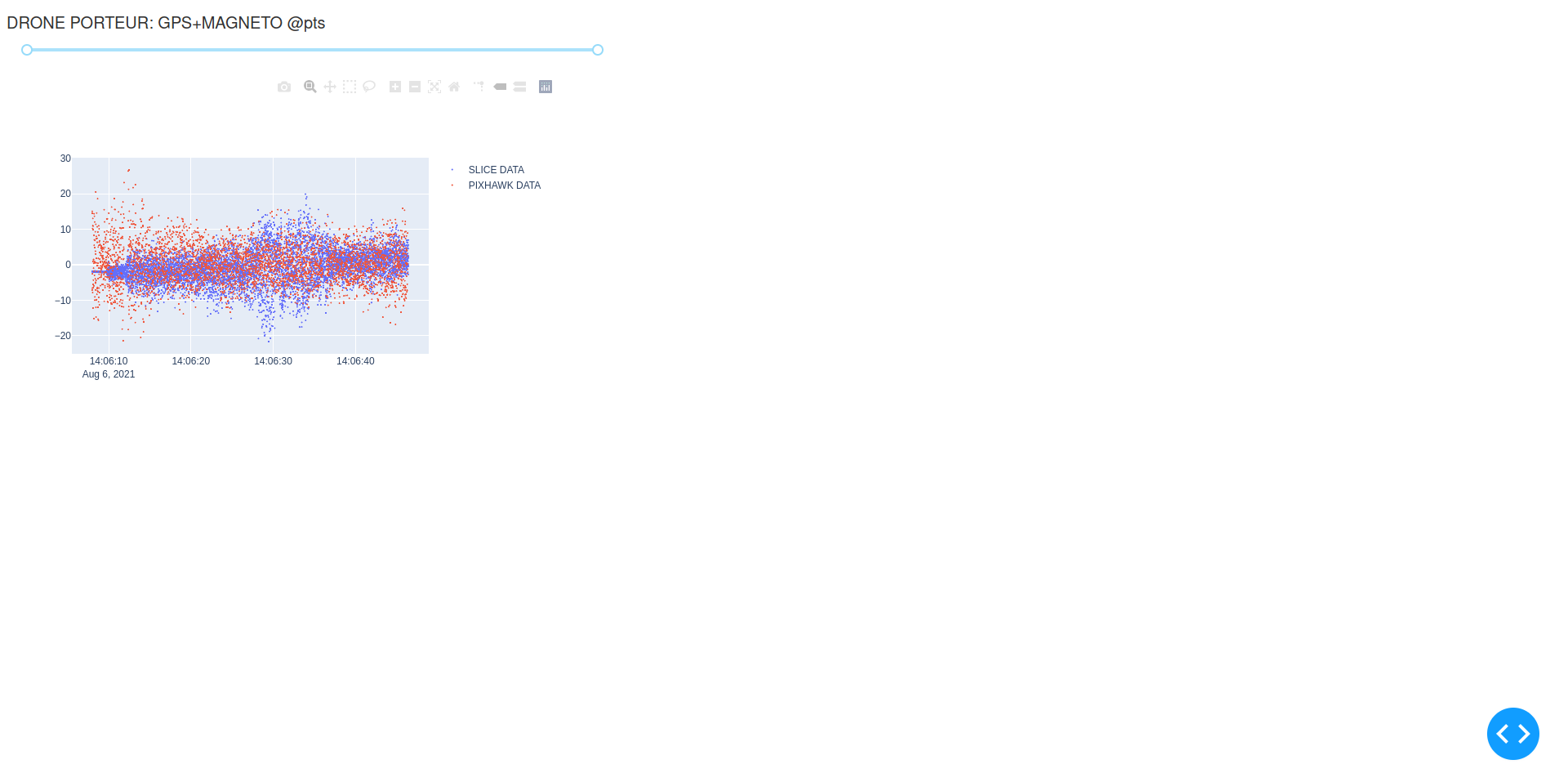
| Exploring all sensors recorded via Pixhawk. |
Data is trimmed dynamically. |
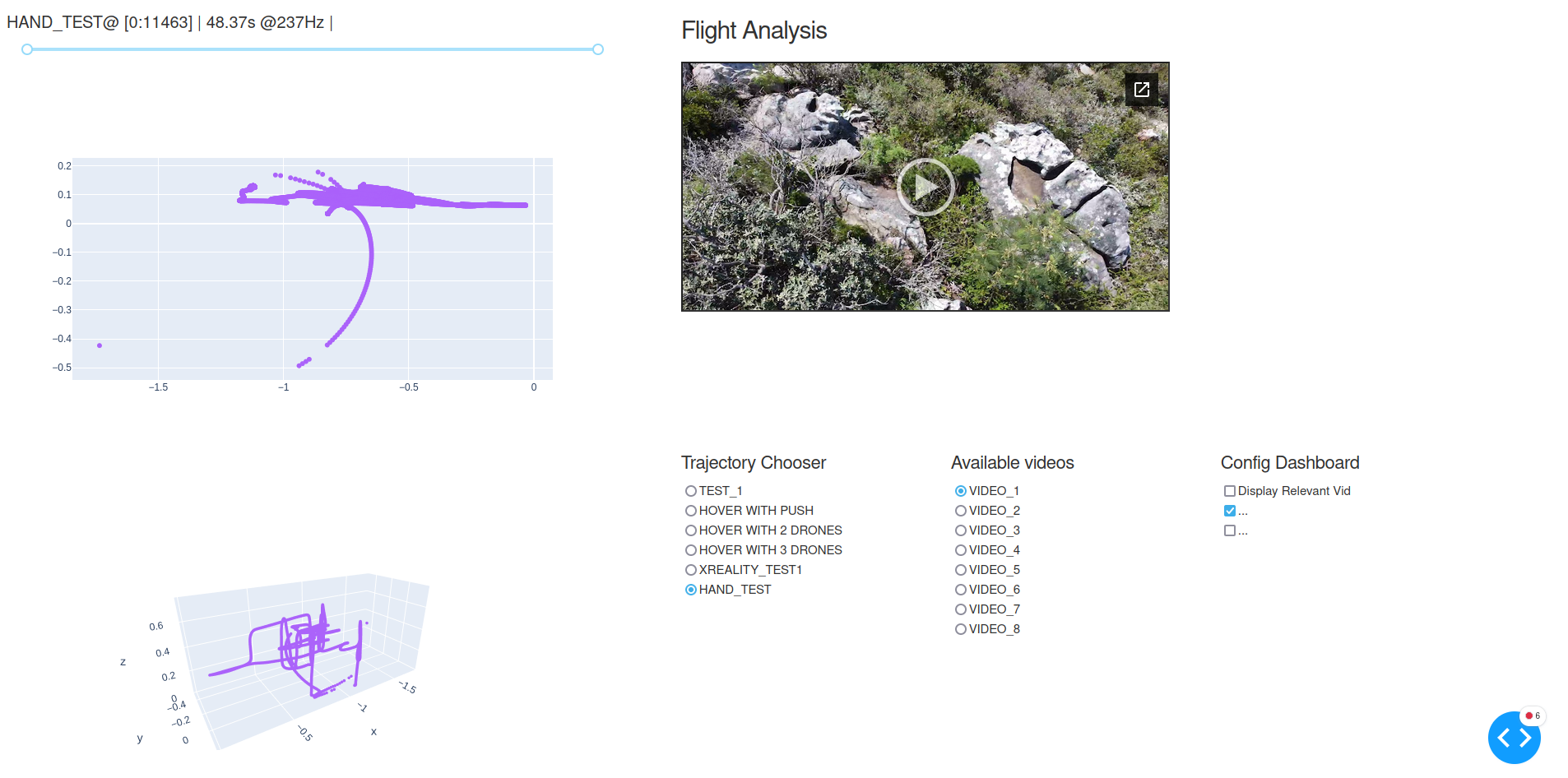
Specific data exploratory dashboards for gesture piloting (Thesis-related)
| scrutiny_dashboard_1 |
CT_piloting_graphs |
 |
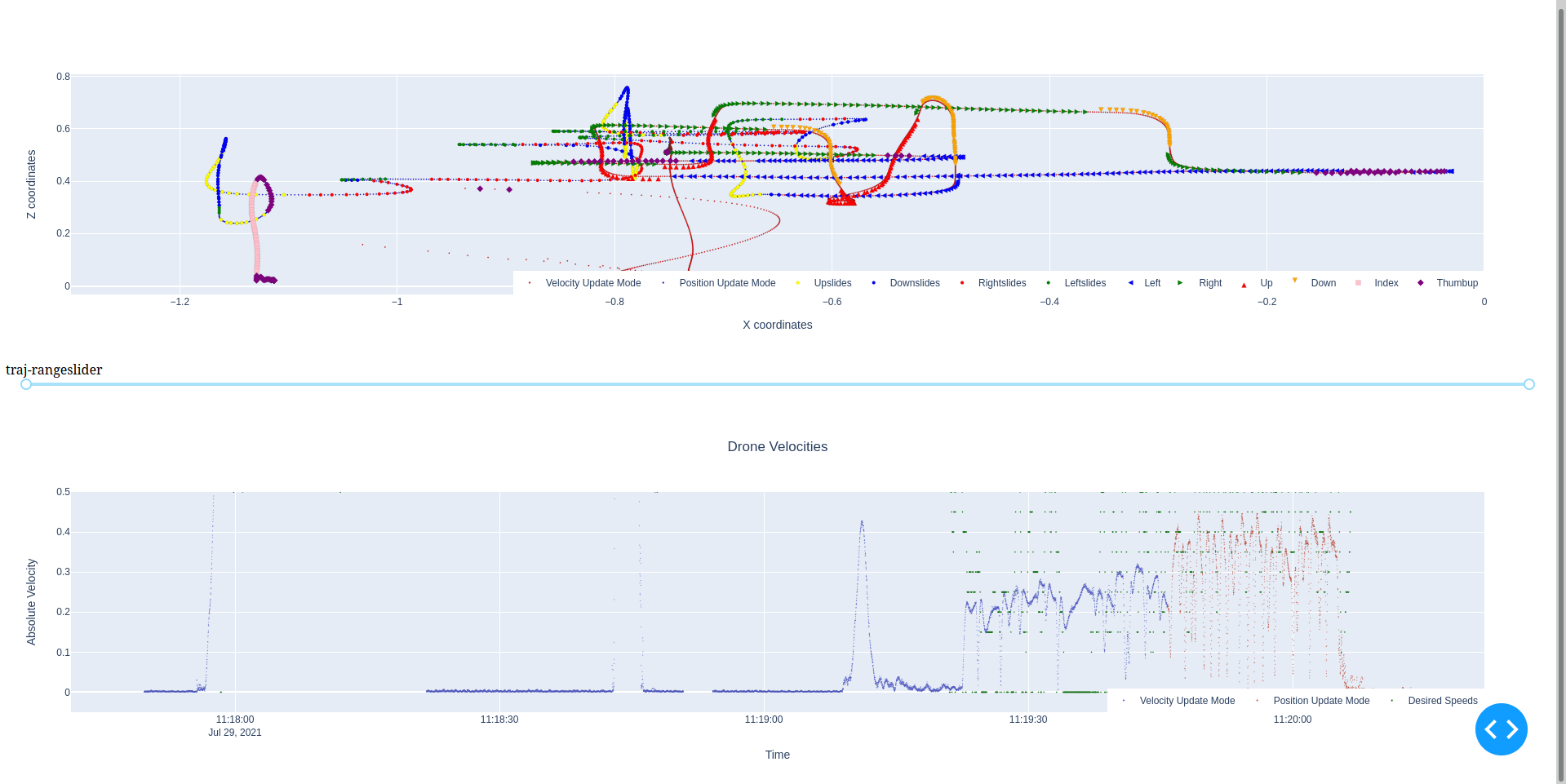 |
| Gesture Piloting: Overview graphs |
Placing human gestures within the trajectory. Thesis-related. |
And more
| CT_smlatency |
AT_correlate_graphs |
 |
 |
| Latency Tests of Collision Interface. Thesis-related. |
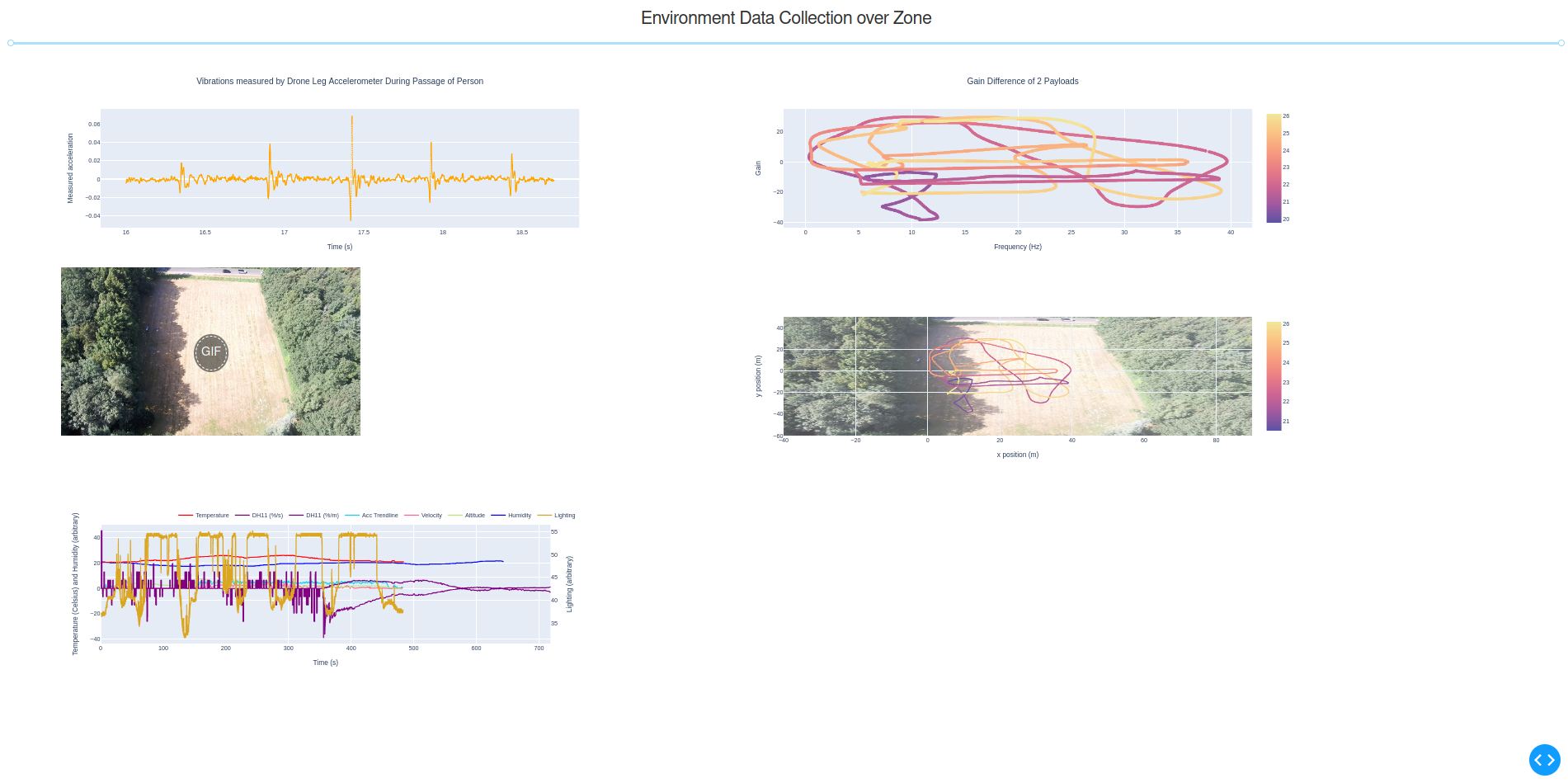
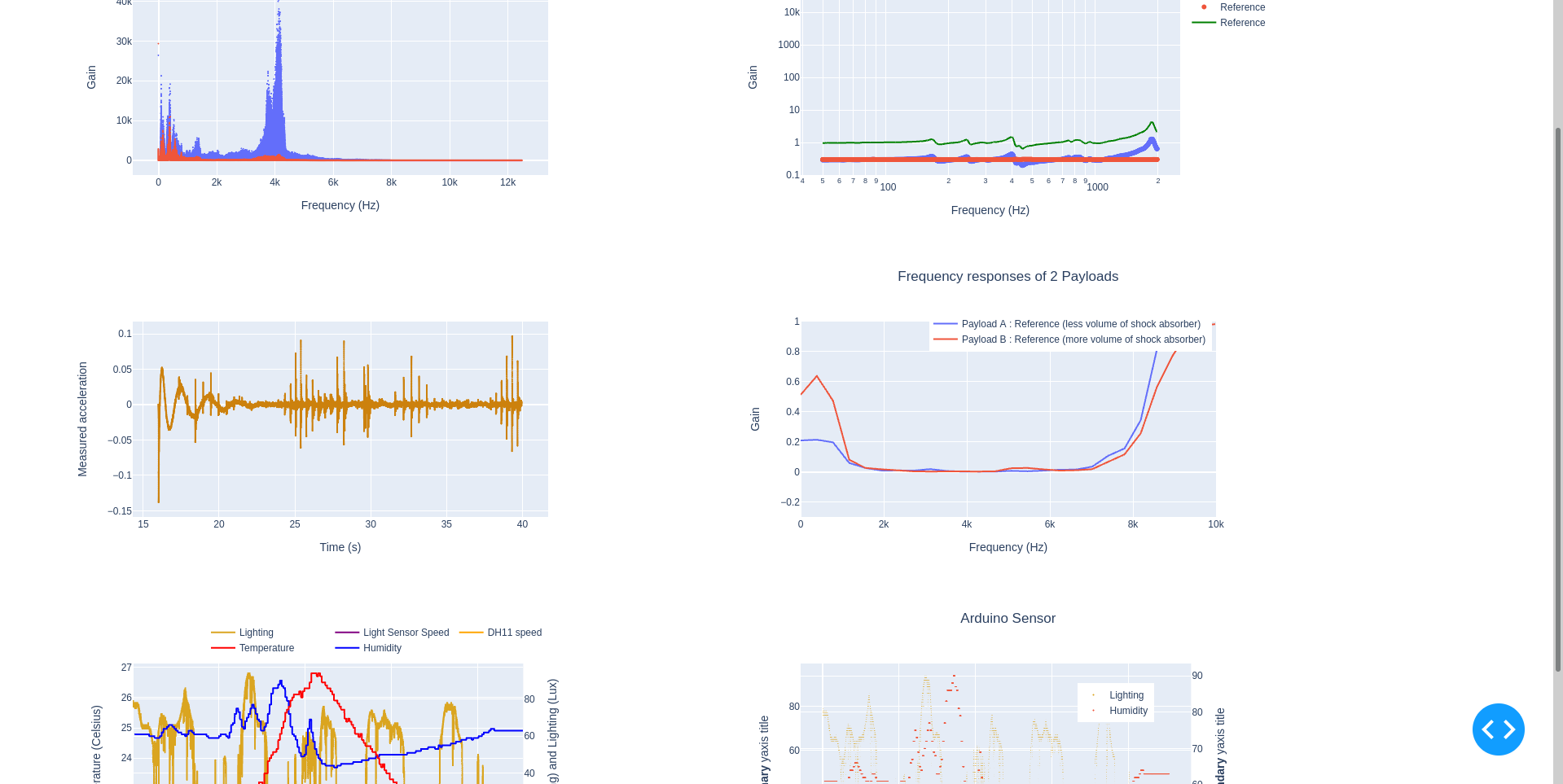
Start of Vibration Data analysis, a Template. |
| AT_article_graphs |
CT_collision_static |
 |
 |
| Some vibration data analysis, some atmosphere data analysis. |
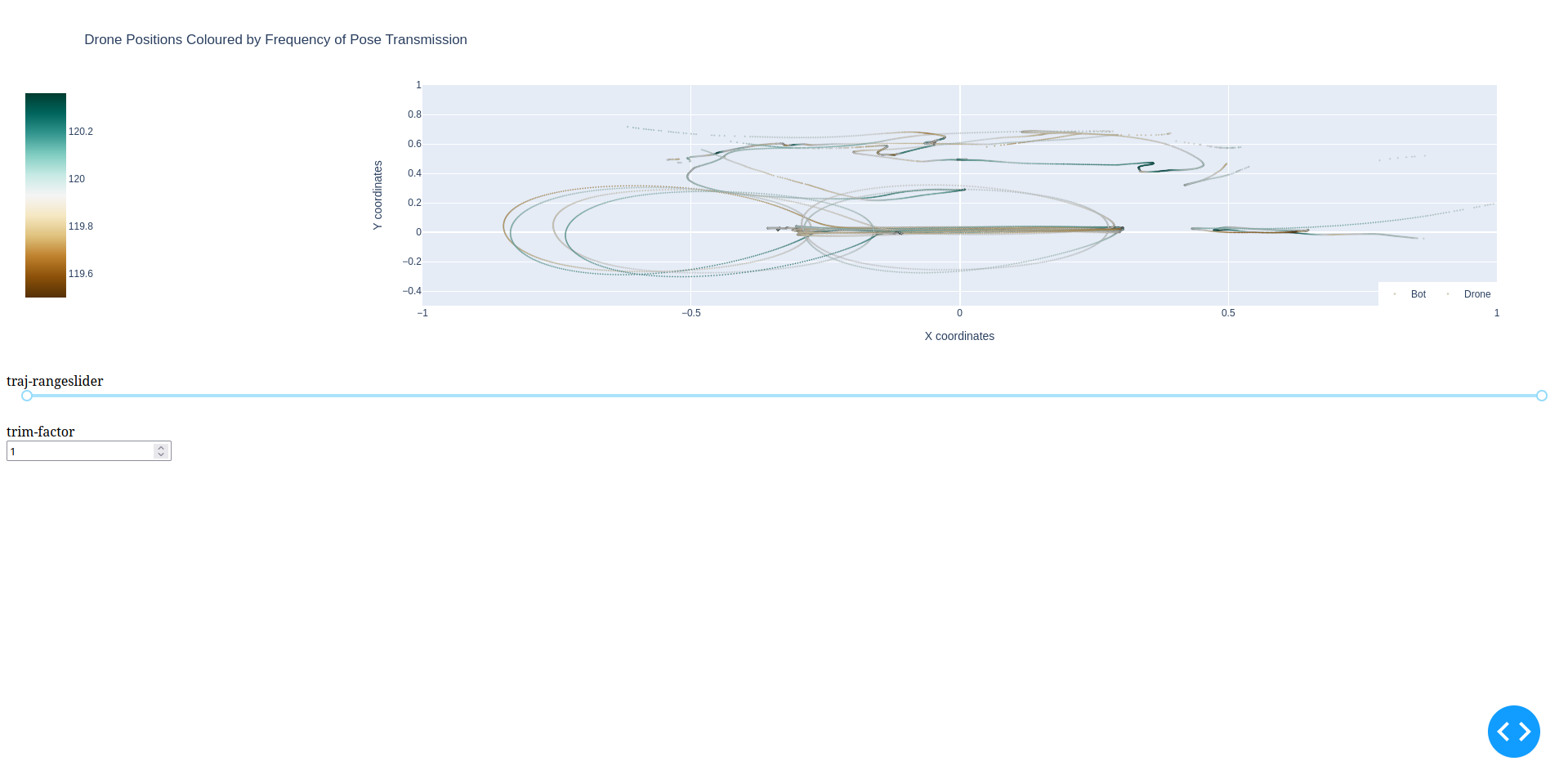
Wifi strength overlaid on drone positions. Experimental. |
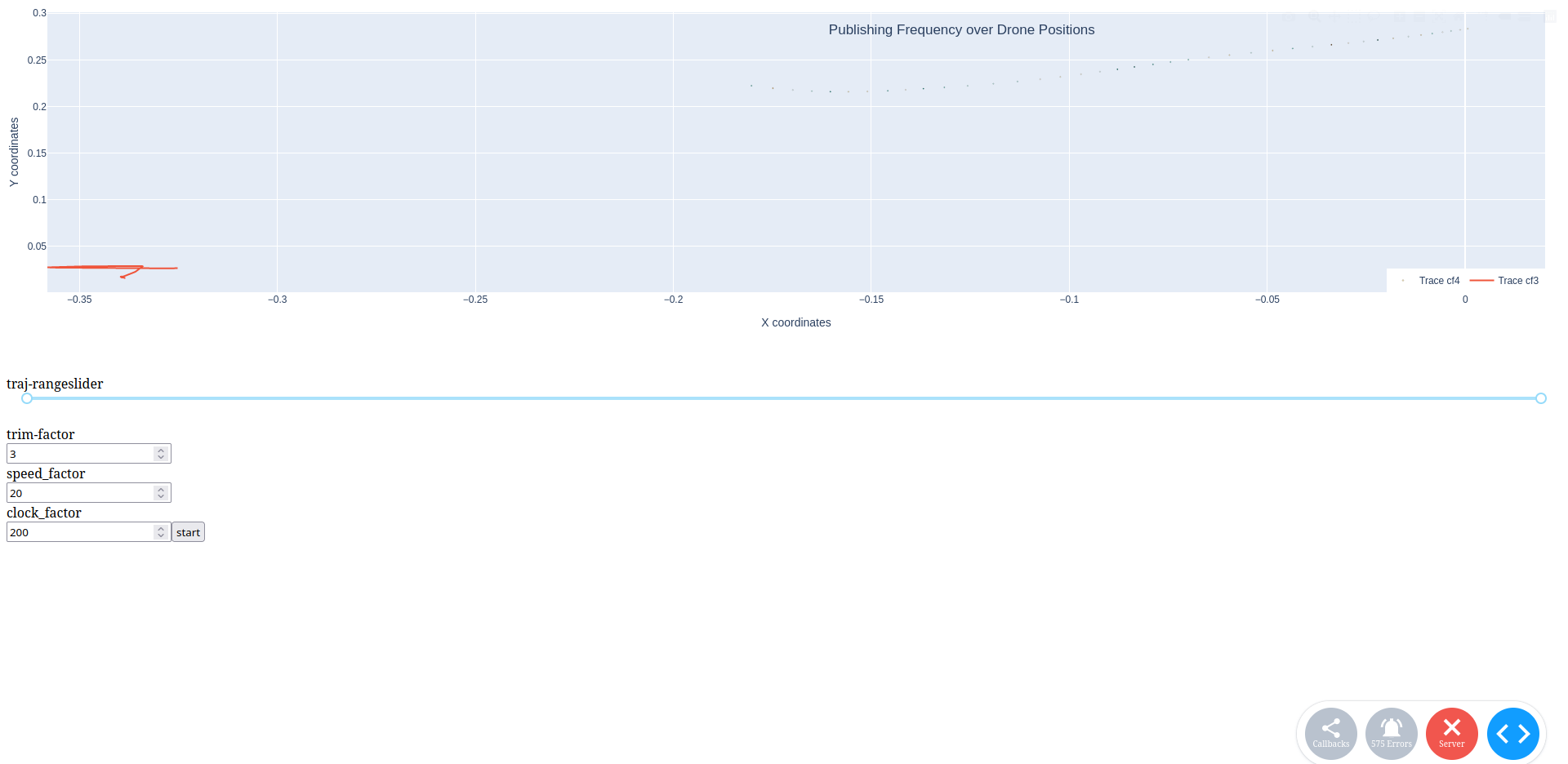
| CT_collision_realtime |
AT_adc2gps_clean |
 |
[Too large] |
| Attempt at real-time drone movement. Experimental. |
Taking the Pixhawk for a walk. The barometer freaked out. |
Some non-Dash animations:
| Lighting scan exercise |
Biggest Changes on Field |
 |
[Too large] |
| Lighting Data Acquisition. First measure of LHT11 effectiveness. |
Changes in lux/m of lighting |
| Humidity scan exercise |
Biggest Changes on Field |
 |
[Too large] |
| Humidity Data Acquisition. First measure of LHT11 effectiveness. |
Changes in %/m of humidity |
| Latency Animation |
Vs. Trajectory plotting. |
 |
[Too large] |
| Timeline of trajectories: Every hump is a spiralling event triggered by a collision. |
We find a way to determine the latency. |

.png)
.png)
.png)
.png)









