unofficial myCobot ROS Package
| industrial_ci | |
|---|---|
| main develop ( main) |
- official repositories
cd ~/catkin_ws/src
git clone https://github.com/Tiryoh/mycobot_ros.gitrosdep install -r -y -i --from-paths .catkin build
catkin source # or "source ~/catkin_ws/devel/setup.bash"Execute download_gazebo_models.sh to download the Gazebo models manually.
rosrun mycobot_gazebo download_gazebo_models.shroslaunch mycobot_move_it_config demo.launch

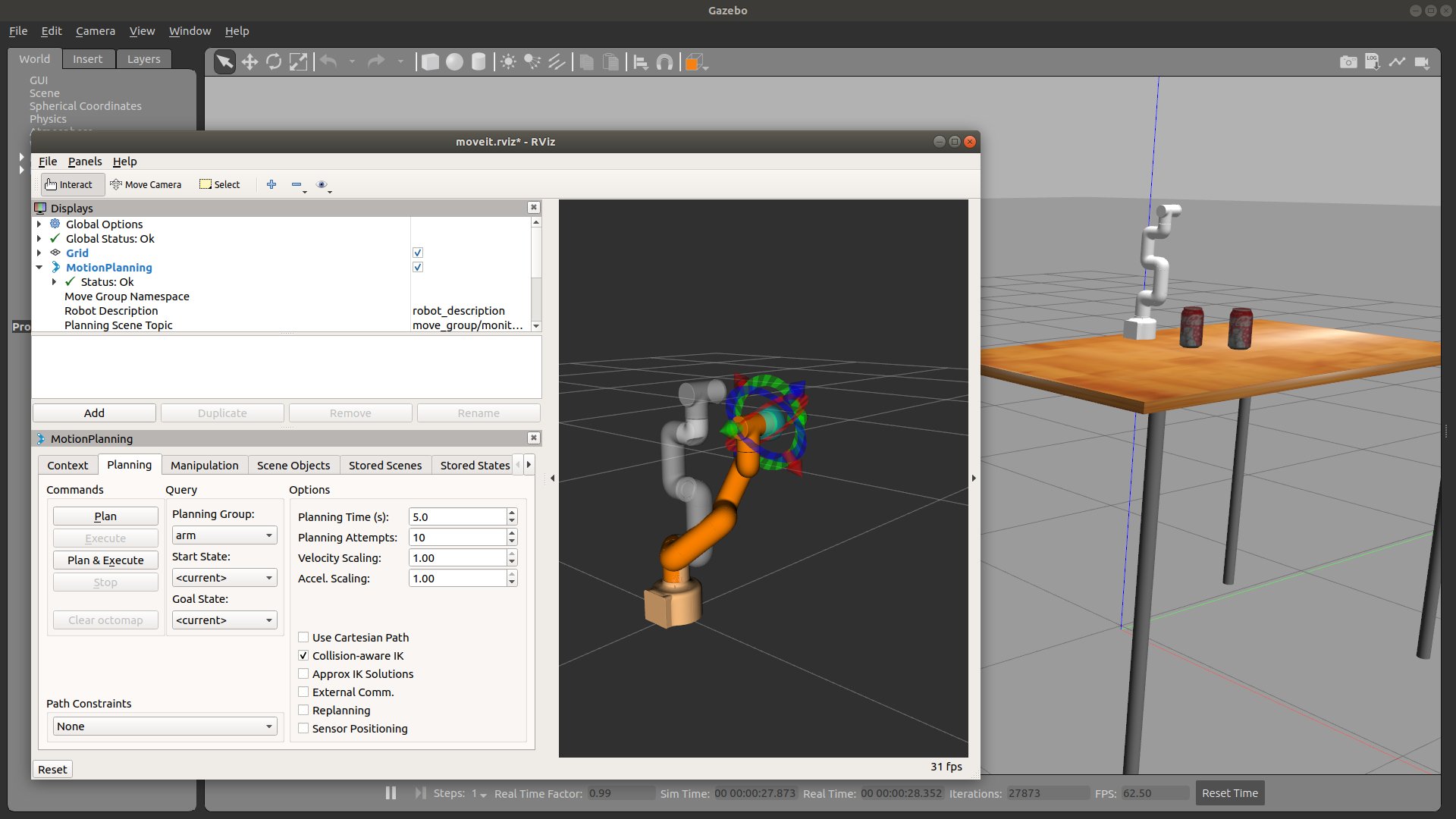
roslaunch mycobot_move_it_config demo_gazebo.launch

This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is licensed under the MIT license.
- elephantrobotics/myCobotROS
Copyright (c) 2020, Elephant Robotics- BSD-2-Clause
- rt-net/jnmouse_sim
(C) 2020 RT Corporation <support@rt-net.jp>- Apache-2.0
- ros-planning/moveit
Copyright (c) 2008-2013, Willow Garage, Inc.- BSD-3-Clause
This software includes works that is distributed in the Apache License 2.0.
https://www.apache.org/licenses/LICENSE-2.0