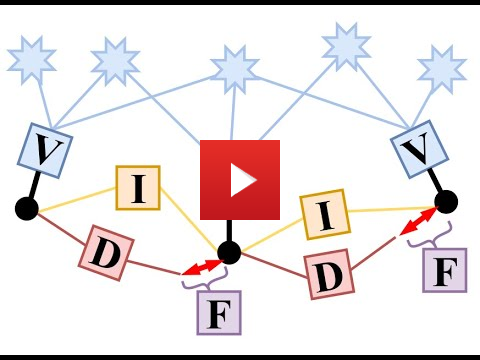
VIMO is a visual-inertial state and force estimator for multicopters. It incorporates robot's dynamic model in an optimization-based visual-inertial odometry system, such as VINS-Mono, to additionally provide external force estimates. Similar to IMU pre-integration, it preintegrates collective thrust generated by the propellors to form dynamic factors which, together with IMU factors, help distinguish between commanded motion and external disturbance.
If you use VIMO in an academic context, please cite the following paper:
VIMO: Simultaneous Visual Inertial Model-based Odometry and Force Estimation, Barza Nisar, Philipp Foehn, Davide Falanga, Davide Scaramuzza (RSS/IEEE-RAL, 2019), pdf
1.1 Ubuntu and ROS Ubuntu 16.04 or newer ROS Kinetic or newer. ROS Installation additional ROS pacakge
sudo apt-get install ros-YOUR_DISTRO-cv-bridge ros-YOUR_DISTRO-tf ros-YOUR_DISTRO-message-filters ros-YOUR_DISTRO-image-transport
1.2. Ceres Solver Follow Ceres Installation, remember to make install. (Our testing environment: Ubuntu 18.04.3, ROS Melodic, OpenCV 3.4.9, Eigen 3.3.4)
Clone the repository and catkin_make:
cd ~/catkin_ws/src
git clone https://github.com/uzh-rpg/vimo.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
Note: Current VIMO version fails if control commands are zero. Therefore, it is recommended to run it offline on datasets and ros bags.
Video:
We can only run VIMO on datasets that contain motor speeds or control commands. One such dataset is Blackbird Dataset. We tested VIMO on Blackbird's star and picasso sequences. Settings to run VIMO on Blackbird dataset are in blackbird branch.
cd ~/catkin_ws/src/vimo
git checkout blackbird
cd ../..
catkin_make
Update the configuration parameters for blackbird dataset in vimo/config/blackbird/blackbird_config.yaml
Open three terminals, launch the vimo_estimator, rviz and play the bag file respectively. Take star_maxSpeed1p0 for example
roslaunch vimo_estimator vimo.launch
roslaunch vimo_estimator vins_rviz.launch
rosbag play YOUR_PATH_TO_DATASET/star_maxSpeed1p0.bag YOUR_PATH_TO_DATASET/star_maxSpeed1p0_images.bag
(Optional) Visualize ground truth. A naive benchmark publisher edited from VINS-Mono can help you visualize the ground truth. It uses a naive strategy to align VIMO with ground truth. Just for visualization, not for quantitative comparison on academic publications. Before launching the publisher, update the groundtruth csv file path in publish.launch. The csv file is expected to have 8 columns in the order: "time(ns), px, py, pz, qw, qx, qy, qz".
roslaunch benchmark_publisher publish.launch
(Green line is VIMO result, red line is ground truth).
VIMO logs state and mass normalised external force estimates (m/s2) in <output_path>/vimo_result.csv. The output_path can be set in your config.yaml. Additionally, state and force estimates are published on ros topics "/vimo_estimator/odometry" and "/vimo_estimator/extForces".
We implement model preintegration and dynamic factor atop the source code of VINS-Mono. We use ceres solver for non-linear optimization, DBoW2for loop detection, and a generic camera model. Features such as automatic estimator initialization, online extrinsic calibration, failure detection and recovery, loop detection, and global pose graph optimization, map merge, pose graph reuse, online temporal calibration, rolling shutter support are also from VINS-Mono.
The source code is released under GPLv3 license.
We are still working on improving the code reliability. For any technical issues, please contact Barza Nisar barza@ifi.uzh.ch or Philipp Foehn foehn@ifi.uzh.ch
For commercial inquiries, please contact Davide Scaramuzza scarabotics@gmail.com