Demonstration Video: https://youtu.be/U3qpVNBdowI
This repository contains the code and documentation for the Micro Mouse Maze competition, held as part of the Shaastra Techfest at IIT Madras. The goal of this competition is to build a compact robot that can navigate through a maze and reach the center in the shortest possible time.
The challenge is to design and build a small, autonomous robot that can navigate through a maze and reach the center as quickly as possible. The maze is designed to be complex and challenging, with walls, dead ends, and other obstacles that the robot must navigate around.
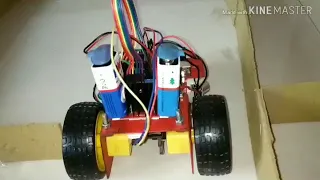
We participated in the Micro Mouse Maze competition in 2019 and 2020. Our approach was to use a combination of flood fill algorithm and PID control to solve the maze smoothly and efficiently. We used ultrasonic sensors to detect the walls and encoders to track the distance traveled by the robot. We fed this data into our flood fill algorithm and PID controller to guide the robot through the maze.
Our robot performed well in the competition, completing the maze in a short amount of time and reaching the center accurately. We were able to fine-tune our algorithm and control parameters to optimize our performance, and we learned a lot about robotics and control systems in the process.
Participating in the Shaastra-IITM Micro Mouse Maze competition was a challenging and rewarding experience. We were able to apply our knowledge of robotics and control systems to build a robot that could navigate through a complex maze and achieve its objective. We hope that our code and documentation can be useful to other students and enthusiasts who are interested in robotics and automation.