xbot_obstacle_avoidance
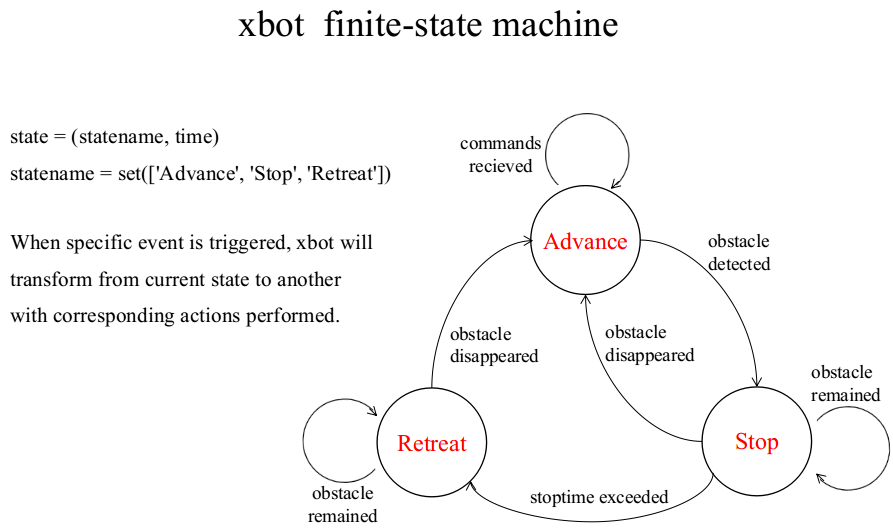
To implement obstacle avoidance for xbot, a finite-state machine is designed.
subscribed topics:
/scan
/cmd_vel_mux/input/navi
published topics:
/cmd_vel_mux/input/safety_controller
run xbot_obstacle_avoidance.launch
```bash
roslaunch xbot_obstacle_avoidance xbot_obstacle_avoidance.launch
```