This repository contains various Ground Segmentation baseline methods. Currently, 7 projects are organized for SemanticKITTI dataset:
- GPF (Ground Plane Fitting)
- CascadedSeg
- R-GPF (Region-wise GPF)
- LineFit
- Mono plane estimation by RANSAC
- Patchwork (ver.1)
- Gaussian Floor Segmentation
The repository consists of C++ and ROS. But, for python users, we also provide all the previously extracted ground label files. Please check the explanations below.
If our open sources have been helpful, please cite the below papers published by our research group:
@inproceedings{oh2022travel,
title={{TRAVEL: Traversable ground and above-ground object segmentation using graph representation of 3D LiDAR scans}},
author={Oh, Minho and Jung, Euigon and Lim, Hyungtae and Song, Wonho and Hu, Sumin and Lee, Eungchang Mason and Park, Junghee and Kim, Jaekyung and Lee, Jangwoo and Myung, Hyun},
booktitle={IEEE Robotics and Automation Letters},
year={2022},
note={{Submitted}}
}
@inproceedings{lee2022patchworkpp,
title={{Patchwork++: Fast and robust ground segmentation solving partial under-segmentation using 3D point cloud}},
author={Lee, Seungjae and Lim, Hyungtae and Myung, Hyun},
booktitle={Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst.},
year={2022},
note={{Submitted}}
}
@article{lim2021patchwork,
title={Patchwork: Concentric Zone-based Region-wise Ground Segmentation with Ground Likelihood Estimation Using a 3D LiDAR Sensor},
author={Lim, Hyungtae and Oh, Minho and Myung, Hyun},
journal={IEEE Robot. Autom. Lett.},
volume={6},
number={4},
pages={6458--6465},
year={2021},
}
- Description
- Requirements
- Preparing DataSet
- Getting Started
- Python visualization / Provided result files
This benchmark provides:
- The benchmark calculates the performance of each method and save the results as csv files.
- The output files contain
frame index - time taken - Precision - Recall - TP - FP - FN - TFvalues. - Two versions are to be saved: considering vegetation / not considering vegetation.

- It visualizes the ground segmentation result on RVIZ.
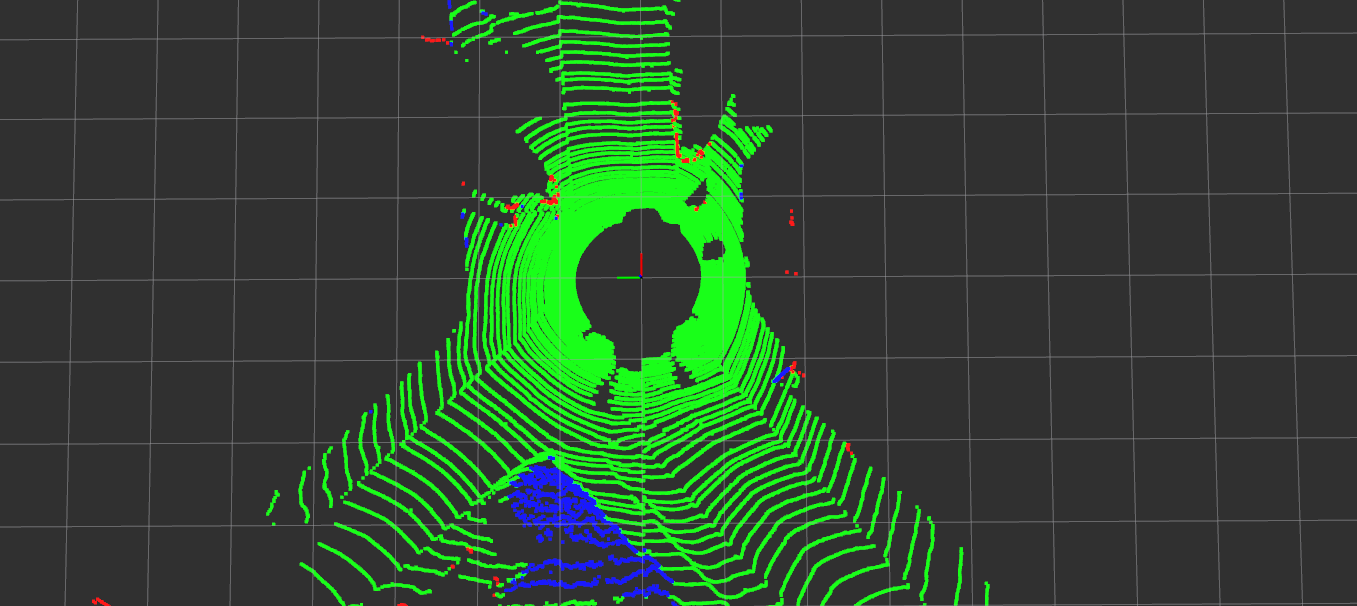
- green: True Positive
- blue: False Negative
- red: False Positive

The code wass tested successfully at
- Linux 18.04 LTS
- ROS Melodic
- Ptyhon 3.6.9
- Install ROS on a machine
- Install jsk_visualization (For visualization of GLE of Patchwork)
sudo apt update
sudo apt-get install ros-melodic-jsk-recognition
sudo apt-get install ros-melodic-jsk-common-msgs
sudo apt-get install ros-melodic-jsk-rviz-plugins
- Install PCL
sudo apt-get install libpcl-dev
- Clone our package with catkin tools
$ cd ~/catkin_ws/src
$ git clone git@github.com:url-kaist/Ground-Segmentation-Benchmark.git
$ catkin build gseg_benchmark- Download SemanticKITTI Odometry dataset including Velodyne point clouds, calibration data, and label data.
- Set
data_pathparameter in shellscripts/common.sh for your machine.
The data_path consists of velodyne folder and labels folder as follows:
${data_path}
|___00
|___labels
| |___000000.label
| |___000001.label
| |___ ...
|___velodyne
|___000000.bin
|___000001.bin
|___ ...
|___01
|___labels
| |___ ...
|___velodyne
|___ ...
- Set parameters about dataset path, running method, saving csv output files in
shellscripts/common.sh. - Make directories to load SemanticKITTI dataset and save output files and apply them in rosparam setting.
rosparam set /data_path "/home/user/data/SemanticKITTI/" # absolute path of downloaded KITTI dataset. It must include '/' at the end part
rosparam set /stop_for_each_frame false # set as 'true' to make it stop every frame
rosparam set /init_idx 0 # index of first frame to run
rosparam set /save_csv_file true # set as 'false' if csv output files are not needed
rosparam set /save_pcd_flag false # set as 'false' if csv output files are not needed
rosparam set /output_path "/data/" # reltive path of output files to be generated
- Start roscore:
$ roscore- Open a new terminal and launch node with specification of algorithm and data sequence:
$ roslaunch gseg_benchmark gseg_benchmark.launch alg:=${name of algorithm} seq:=${sequence}For example,
$ roslaunch gseg_benchmark gseg_benchmark.launch alg:=patchwork seq:=05- There are 7 algorithms provided:
gpf,cascaded_gseg,r_gpf,linefit,ransac,patchwork,gaussian - The examples of
seqare 00, 01, ..., 10- If you do not set
seqor set asseq:=all, then the csv output files of all datasets from "00" to "10" will be saved automatically.
- If you do not set
- Rviz result will be shown automatically.
We provide csv files of binary estimated results of sequences from "00" to "10". The value 1 denotes the corresponding point is estimated as the ground, whereas 0 denotes the point is considered as the non-ground.
The previously extracted ground labels can be downloaded via the below commands:
wget https://urserver.kaist.ac.kr/publicdata/GroundSegBenchmark/cascaded_gseg_ground_labels.zip
wget https://urserver.kaist.ac.kr/publicdata/GroundSegBenchmark/gpf_ground_labels.zip
wget https://urserver.kaist.ac.kr/publicdata/GroundSegBenchmark/gpregression_ground_labels.zip
wget https://urserver.kaist.ac.kr/publicdata/GroundSegBenchmark/linefit_ground_labels.zip
wget https://urserver.kaist.ac.kr/publicdata/GroundSegBenchmark/patchwork_ground_labels.zip
wget https://urserver.kaist.ac.kr/publicdata/GroundSegBenchmark/ransac_ground_labels.zip
wget https://urserver.kaist.ac.kr/publicdata/GroundSegBenchmark/r_gpf_ground_labels.zip
We provide Python code to visualize estimated results in binary form.
pip install open3d
- Set parameters in
src/utils/viz_all_frames.pyorsrc/utils/viz_one_frame.py.
alg = "patchwork"
seq = "04"
kittiraw_dir = "/home/user/data/SemanticKITTI/" # absolute path of KITTI dataset folder
label_csv_dir = "/home/user/data/" # absolute path of directory to save csv files
frame_num ="000010" # needed only in viz_one_frame.py
- Run python code
$ cd ~/catkin_ws/src/Ground-Segmentation-Benchmark/src/utils
$ python3 viz_one_frame.py
$ python3 viz_all_frames.py
- green: ground, black: non-ground
- Hyungtae Lim:
shapelim at kaist dot ac dot kr - Jeewon Kim (as a research intern @URL):
ddarong2000 at kaist dot ac dot kr
If the following error occurs in flann
/usr/include/flann/util/serialization.h:35:14: error: ‘class std::unordered_map<unsigned int, std::vector<unsigned int> >’ has no member named ‘serialize’
then open header file
sudo gedit /usr/include/flann/util/serialization.h
and change all terms of "map" into "unordered_map".
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.

- All codes on this page are copyrighted by KAIST and published under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 License. You must attribute the work in the manner specified by the author. You may not use the work for commercial purposes, and you may only distribute the resulting work under the same license if you alter, transform, or create the work.