在城市道路驾驶中,我们经常会遇到需要车辆掉头的场景,请设计并实现一个轨迹生成类(一个或者几个class/struct组成),能够生成一条位置、曲率平滑的轨迹,让车辆能够完成掉头运动。
输入:需要完成掉头的两条车道的中心线数据,中心线的每个点数据包含位置与朝向(x,y,theta)
输出:连接两条车道的完整轨迹,轨迹中每个点包含位置、朝向与曲率数据(x,y,theta,kappa)
使用A-Star来寻找可行驶轨迹。在离散的情况下A-Star给出的路径不是可行驶的,但是当我们加入汽车的动力学约束后,也许可以达到题目要求的结果。
- 使用动力学约束来计算A-Star的可扩展区域(格子)
- 约束动力学模型的同时,HeuristicCost也需要根据U-Turn的场景进行适当的优化
- 删除不合理的区域(碰到障碍物,地图外,效率低等)
- 记录连续的车辆状态以及状态关联的离散格子
- 待得到搜索结果后取出路径相关联的连续状态数据(x,y,theta)
- 检查曲率是否平滑
- 可视化
- 可视化部分使用python的matplotlib
- 测试代码部分并没有引入测试框架(gtest,boosttest等),而是用脚本配合c++ assert的轻量化方案, 因为开发和测试过程中需要很多肉眼观测的辅助和 批量的测试文件读取,使用c++对代码维护要求较高, 而且无法做到和代码不耦合的可视化。
-
构建:
cd /path/to/U-Turn-Solution mkdir build cd build cmake .. make cd ..
-
运行测试脚本:
# 测试单个数据并可视化 ./test_and_viz_one.sh ./test_data/lane_data_1.txt # 批量测试所有数据集 ./test_all_and_quiet.sh
测试数据中的lane_data.3.txt是通过不了测试的,因为我给的数据中两个lane之间的距离过长, 可以试试把程序的第一个参数放大到5以上,但是效果不是很好,针对这种长距离的规划我这边还需要优化
-
参数说明:
本程序采用命令行参数传递的形式设置参数,参数设置方法可参照: 第1~6个参数:
// load planner config from command line twx_algo::MotionConfig motion_config = { argc > 1 && argv[1] != NULL ? std::stod(argv[1]) : 1.0, // desired_speed or a-star simulation speed argc > 2 && argv[2] != NULL ? std::stod(argv[2]) : 4.5, // ego car wheelbase argc > 3 && argv[3] != NULL ? std::stod(argv[3]) : 40.0, // max steering angle argc > 4 && argv[4] != NULL ? std::stod(argv[4]) : -40}; // min steering angle twx_algo::hybrid_a_star::SearchConfig search_config = { argc > 5 && argv[5] != NULL ? std::stod(argv[5]) : 20.0, // explore steering angle step argc > 6 && argv[6] != NULL ? std::stod(argv[6]) : 1.0}; // time duration each exploration
第7个参数为环境信息即lane数据:
if (argc > 7 && argv[7] != NULL) { lane_data_file_name = argv[7]; std::ifstream lane_stream(argv[7], std::ifstream::in); ... }
所以在我的测试脚本中我是这么做的:
./build/u_turn_planner_test 1.0 3 40 -40 40 1.0 ./test_data/lane_data.txt
-
文件夹说明:
./test //可执行程序入口代码
./test_data //测试数据和可视化结果
-
路径搜索使用了Hybrid A Star,‘Hybrid‘意味着路径搜索过程结合了车辆运动模型。也就是在grid map中每向前走一步,都只搜索车辆可到达的区域。
-
A Star中没有使用3维数组形式的真栅各地图,而是:
std::vector<std::map<Point, State>>该形式有点像稀疏矩阵的表达方式, 大大节约了空间消耗,也大大减轻的坐标系转换的工作。
-
车辆运动模型为:
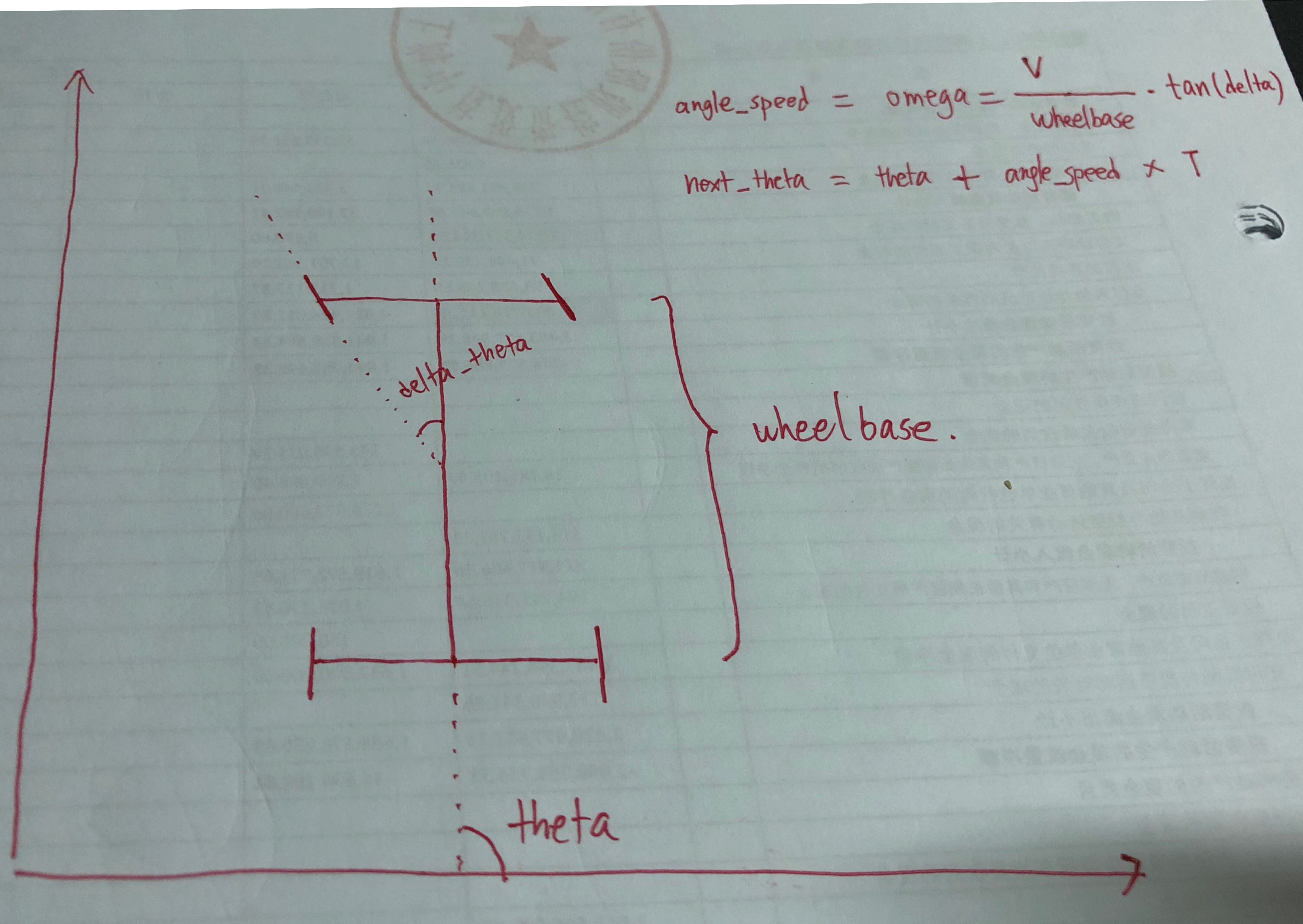 相关代码:
相关代码:double delta = M_PI * steering / 180.0; double omega = motion_config_.desired_speed / motion_config_.wheelbase * std::tan(delta); double next_theta = theta + omega * search_config_.time_step; double next_x = x + motion_config_.desired_speed * std::cos(theta) * search_config_.time_step; double next_y = y + motion_config_.desired_speed * std::sin(theta) * search_config_.time_step;
-
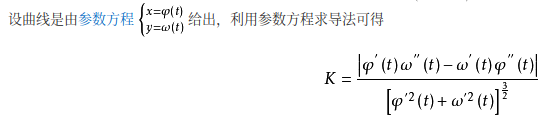
最终的轨迹经过了拟合以及重采样,为了让轨迹是平滑的,同时也是为了计算kappa kappa的计算根据该公式得出:


生成半圆曲线作为reference line, 然后使用qp进行优化。 该方法没有比较合理的壁障方案。
使用目标lane的入口作为end-configuration space,然后使用Jerk minimize直接求解汽车可执行轨迹,然后检查轨迹是超过边界或存在碰撞。该方法可能导致计算出的trajectory不满足车子的物理特性,比如某些点的curve过大。下面给出一个最简单的JMT实现:
/**
* jerk-minimized trajectory solver
* @param start Init configuration
* @param end Final configuration
* @return JMT params
*/
TrajectoryParams generate_jerk_minimized_trajectory(
const TrajectoryReference &start,
const TrajectoryReference &end
) {
TrajectoryParams trajectory_params;
trajectory_params.T = end.timestamp - start.timestamp;
// rectify round trip behavior:
double rectified_start_s = start.s;
double rectified_end_s = end.s;
if (rectified_start_s > rectified_end_s) {
rectified_start_s -= 6945.554;
}
trajectory_params.s = solve_jerk_minimized_trajectory(
rectified_start_s, start.vs, start.as,
rectified_end_s, end.vs, end.as,
trajectory_params.T
);
trajectory_params.d = solve_jerk_minimized_trajectory(
start.d, start.vd, start.ad,
end.d, end.vd, end.ad,
trajectory_params.T
);
return trajectory_params;
}
std::vector<double> solve_jerk_minimized_trajectory(
double x0, double vx0, double ax0,
double x1, double vx1, double ax1,
double T
) {
// pre-computed exponentials of T:
std::vector<double> T_exp{1.0, T, pow(T, 2.0), pow(T, 3.0),pow(T, 4.0), pow(T, 5.0)};
// system matrix:
Eigen::MatrixXd A(3, 3);
A << T_exp[3], T_exp[4], T_exp[5],
3*T_exp[2], 4*T_exp[3], 5*T_exp[4],
6*T_exp[1], 12*T_exp[2], 20*T_exp[3];
// desired output:
Eigen::VectorXd b(3);
b << x1 - (x0 + vx0*T_exp[1] + 0.5*ax0*T_exp[2]),
vx1 - (vx0 + ax0*T_exp[1]),
ax1 - ax0;
// polynomial coefficients:
Eigen::VectorXd coeffs = A.colPivHouseholderQr().solve(b);
return {x0, vx0, 0.5*ax0, coeffs(0), coeffs(1), coeffs(2)};
}