
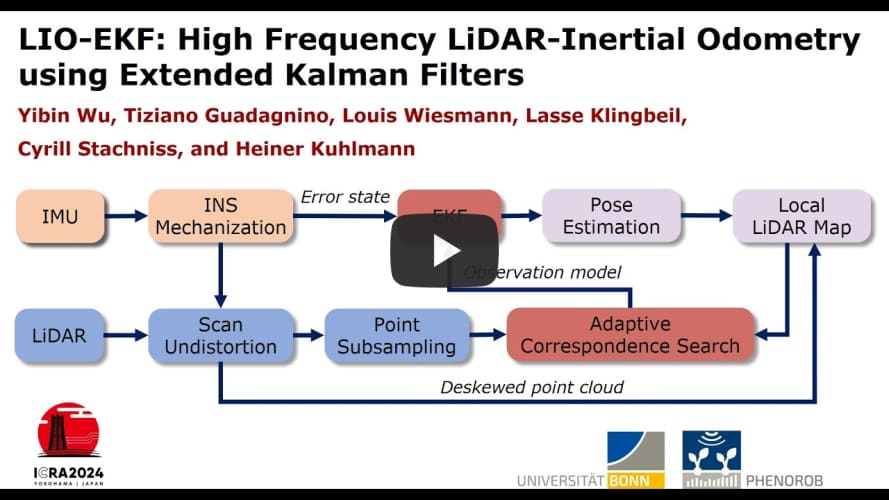
TL;DR: LIO-EKF is a lightweight yet efficient LiDAR-inertial odometry system based on adaptive point-to-point registration and EKF.
-
Ubuntu OS (tested on 20.04)
-
ROS
Follow ROS Noetic installation instructions for Ubuntu 20.04.
cd ~/catkin_ws/src
git clone git@github.com:YibinWu/LIO-EKF.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
Replace the path to the rosbag (bagfile) in the launch files with your own path.
roslaunch lio_ekf urbanNav20210517.launch
roslaunch lio_ekf street_01.launch
roslaunch lio_ekf short_exp.launch
If you find our study helpful to your academic work, please consider citing the paper.
@inproceedings{wu2024icra,
author = {Wu, Yibin and Guadagnino, Tiziano and Wiesmann, Louis and Klingbeil, Lasse and Stachniss, Cyrill and Kuhlmann, Heiner},
title = {{LIO-EKF}: High Frequency {LiDAR}-Inertial Odometry using Extended {Kalman} Filters},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
year = {2024}
}If you have any questions, please feel free to contact Mr. Yibin Wu {yibin.wu@igg.uni-bonn.de}.
Thanks a lot to KISS-ICP, which has inspired this work, and KF-GINS.