This repo contains the implementation of our solution as required in this project for the course ENAE788M.
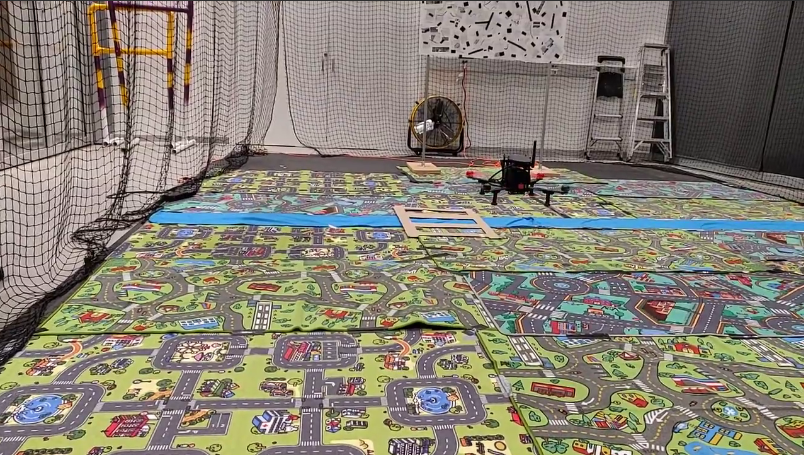
This project required completion of two tasks: Task 1: Cross over the bridge while avoiding the river. Task 2: Detect the wall infront of your quadrotor and go through above or below the wall, depending on the height of the wall.
The submission is a rospackage and it expects a certain directry structure to work.
In your source folder of workspace create a package named noob_quaternions
catkin_create_pkg noob_quaternions rospy roscpp std_msgs geometry_msgs nav_msgs sensor_msgs visualization_msgs
In the src folder of noob_quaternions create a directory named drone-course
mkdir drone-course
Place the folder wall_n_river inside drone-course
Now, to run the wall detection, use
python wall_detection.py
To run the bridge detection, use
python river.py
To run the Neural Network for flow, use
python run.py
Exact details about our implementation for this project are outlined in the submission report. The videos of the live demos and their plots in rviz are present below
The odometry plot begins with quadrotor taking off from the origin and the window is placed to the left of the quadrotor (in front of green axis as seen from the first 2 seconds of the video )
- Rviz visualization
- Live demo

The odometry plot begins with quadrotor mid air with the red axis pointing towards the river. The river is parallel to the plane formed with red and green axis.
- Rviz visualization
- Live demo