Implementation of A-star and Dijkstra algorithms for a point robot and a rigid robot on a given map.
Written on python-2.7:
- numpy
- matplotlib
- heapq
- For point robot (Robot radius = 0)
Run the following command for running the code with dijkstra algorithm
and for A-star
python Planning.py --mode=dijkpython Planning.py --mode=astar
There code requires entering certain parameters such as start-node, goal-node and resolution. This screenshot gives an example of what can be entered and how:

Note: There are two more command line arguments available:
--gui(For turning the animation on and off). The arguments it takes are True for animation on, and False for no animation. For default the animation is always on.--hur(For different heuristic functions). The arguments it takes are euc for Euclidean distance as the heuristic function and man for Manhattan distance as the heuristic function.
Here is shown the output of a sample situation with the following parameters:
- Resolution: 1
- Robot Radius: 0
- Clearance: 2
- Start Node: 2,2 (shown in green)
- Goal Node: 130,130 (shown in blue)
The cyan nodes are explored nodes and Red is the optimal path obtained using dijkstra
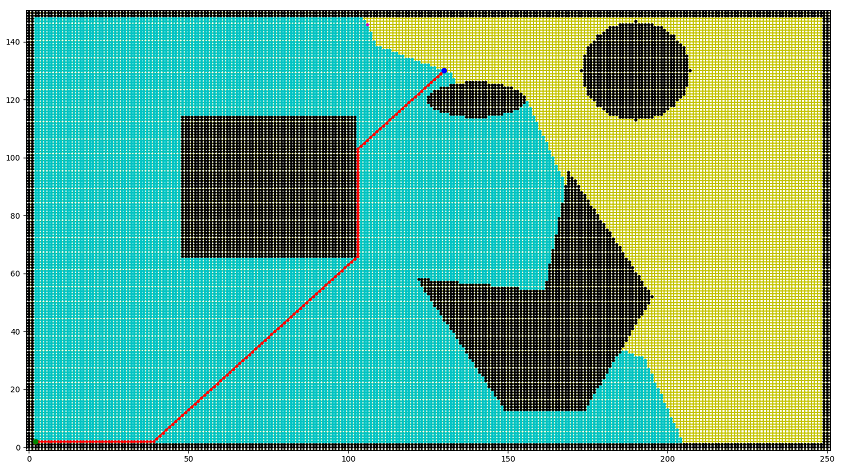

The minimum resolution allowed for the grid is 1 which corresponds to the maximum number of nodes possible(250 along x direction times 150 along the y direction). As the resolution is increased, the scale of the grid will increase i.e., resolution of 2 will generate a grid with 125 points along x-direction times 75 along the y-direction.
The grid ranges from (0,0) to (250,150) with obstacles as given in the problem statement.