IRON: A Fast Interest Point Descriptor for Robust NDT-Map Matching - Reference Implementation
Features:
- IRON provides a simple interface for the alignment of 3D point clouds using 6 degrees of freedom (x, y, z, roll, pitch, yaw)
- Almost any given point cloud format can be directly used without expensive point cloud type conversion beforehand (see src/demo.cpp for an example)
- It's robust and insensitive to a large initial displacement between two point clouds (e.g. when they were captured from different locations)
- IRON uses NDT-maps as an efficient 3D data structure and is able to create them with sufficient accuracy in about 3 ms (average conversion time for a typical Kinect 1 / Asus Xtion point cloud)
- The complete alignment process takes only 10-20 ms on a single core of a modern i7 CPU (depending on registration parameters and map sizes) and is therefore well suited for real-time applications
For algorithmic details and benchmarking results please refer to the original paper:
Schmiedel, Th., Einhorn, E., Gross, H.-M. IRON: A Fast Interest Point Descriptor for Robust NDT-Map Matching and Its Application to Robot Localization. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Hamburg, Germany, 2015
You may also visit my research page for a thorough introduction.
Required packages (Ubuntu 14.04; please install equivalent packages for your Linux distribution):
- build-essential
- libeigen3-dev
- gnuplot-x11
How to run demo?
- cd IRON
- make
- cd examples
- ./demo example1_cloud1.pcd example1_cloud2.pcd
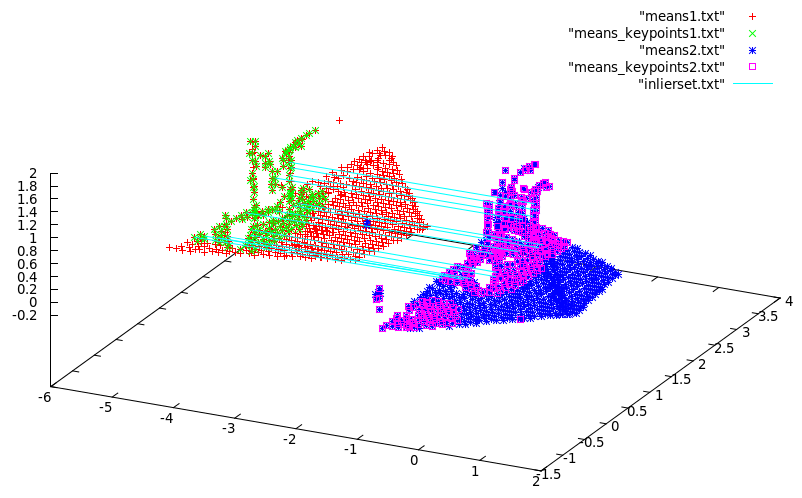
- ./plot_means_keypoints.sh
- ./plot_result.sh
How to use the IRON registration pipeline?
- just include IRON.h into your project
- have a look at src/demo.cpp for a detailed explanation
Please contact me if you have any questions!