Structure PLP-SLAM: Efficient Sparse Mapping and Localization using Point, Line and Plane for Monocular, RGB-D and Stereo Cameras
-
Notice that this work is based on the original OpenVSLAM (renamed now as stella-vslam), which is a derivative work of ORB-SLAM2 without any modification to core algorithms. It was declared in conflict with ORB-SLAM2 (see: stella-cv/stella_vslam#249).
-
For the courtesy of ORB-SLAM2, the granted license of this project is GNU General Public License v3.0. For commercial purposes of this project, please contact department Augmented Vision (https://www.dfki.de/en/web/research/research-departments/augmented-vision), DFKI (German Research Center for Artificial Intelligence), Germany.
-
If you have any technical questions regarding to the implementation, please kindly leave an issue.
[1] F. Shu, et al. "Structure PLP-SLAM: Efficient Sparse Mapping and Localization using Point, Line and Plane for Monocular, RGB-D and Stereo Cameras". IEEE International Conference on Robotics and Automation (ICRA), 2023. (https://arxiv.org/abs/2207.06058) updated arXiv v3 with supplementary materials.
[2] F. Shu, et al. "Visual SLAM with Graph-Cut Optimized Multi-Plane Reconstruction." International Symposium on Mixed and Augmented Reality (ISMAR, poster). IEEE, 2021. (https://arxiv.org/abs/2108.04281)
[3] Y. Xie, et al. "PlaneRecNet: Multi-Task Learning with Cross-Task Consistency for Piece-Wise Plane Detection and Reconstruction from a Single RGB Image." British Machine Vision Conference (BMVC), 2021. (https://arxiv.org/abs/2110.11219)

-
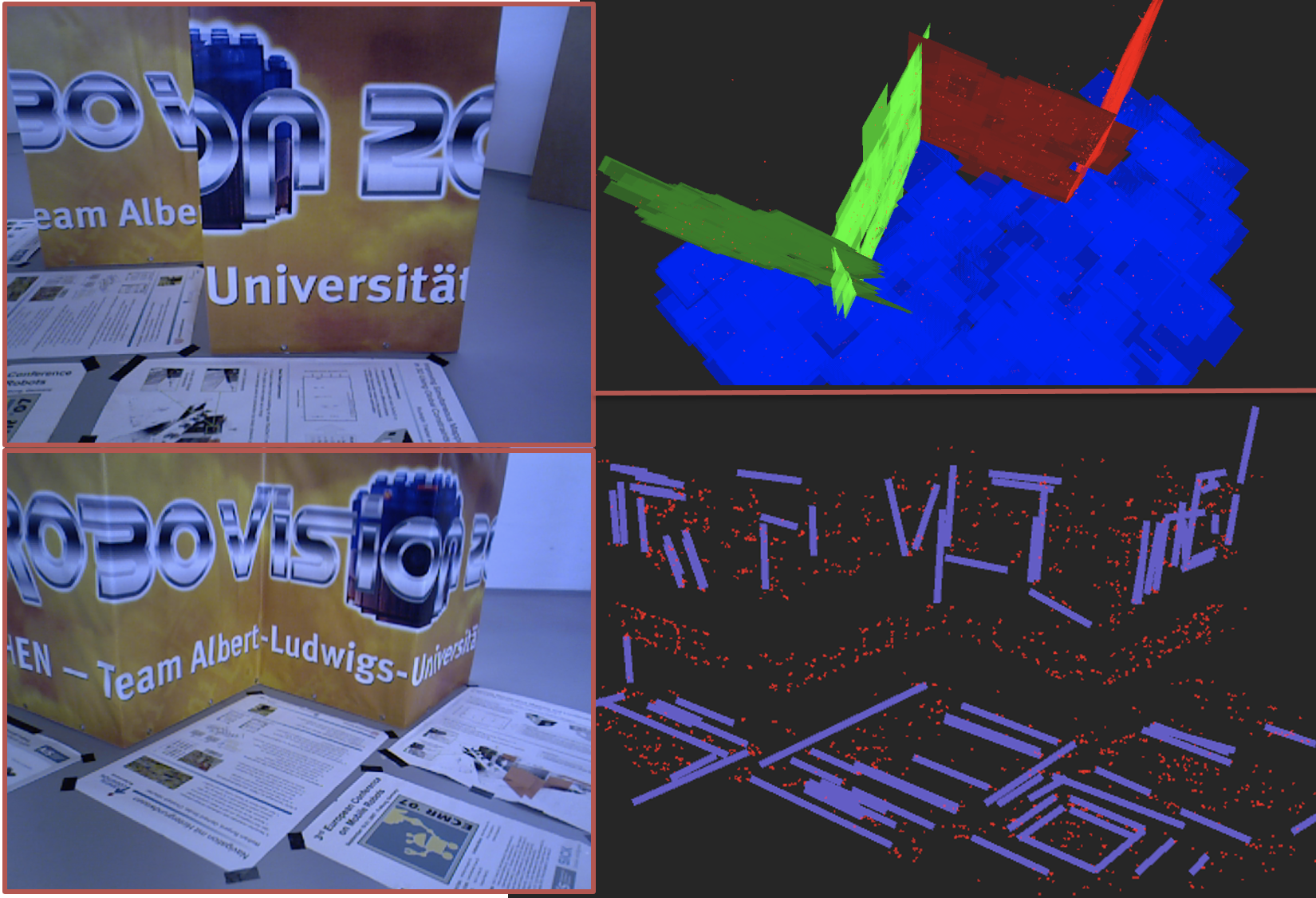
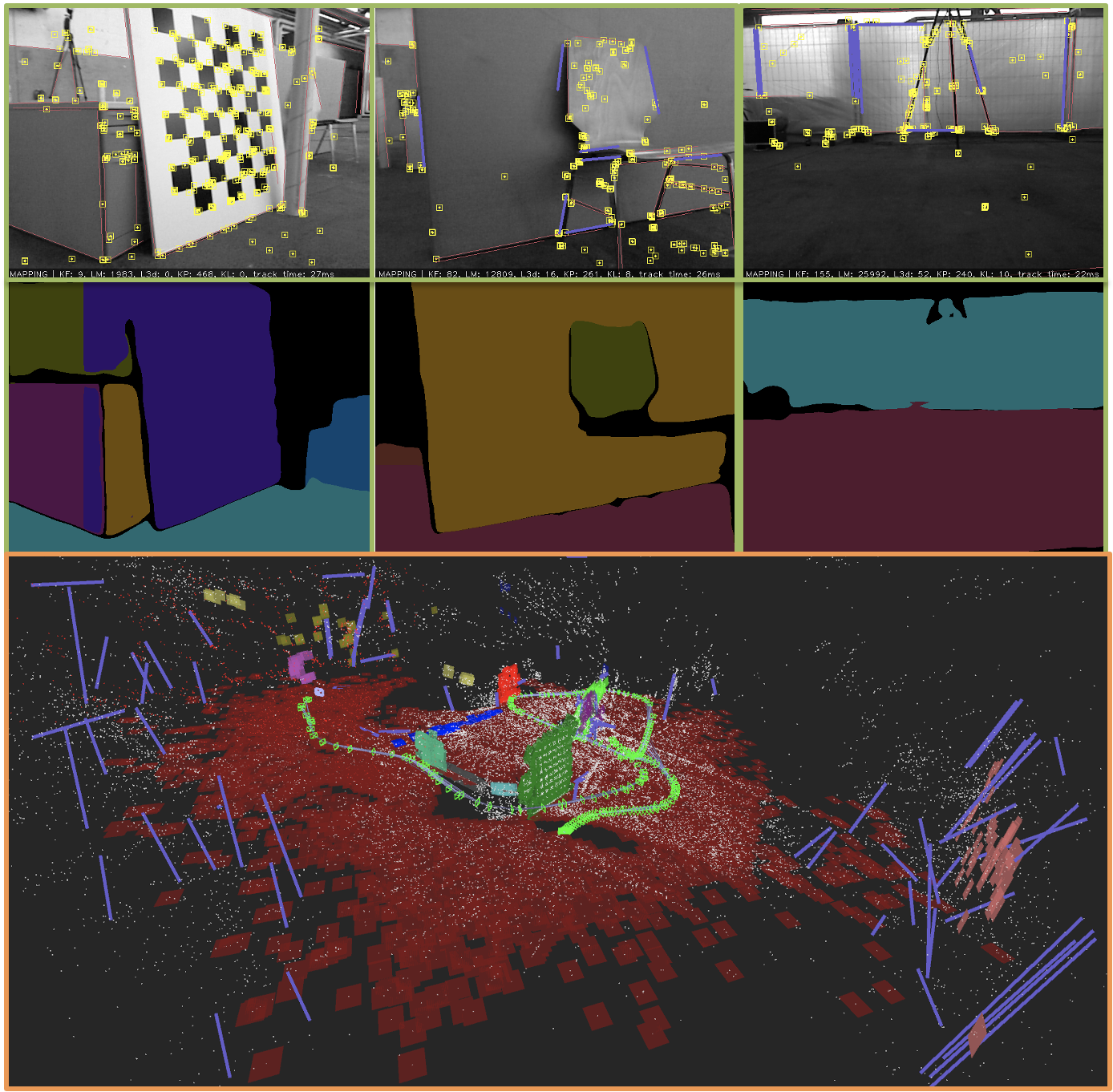
fr3_structure_texture_far (dataset TUM RGB-D)
-
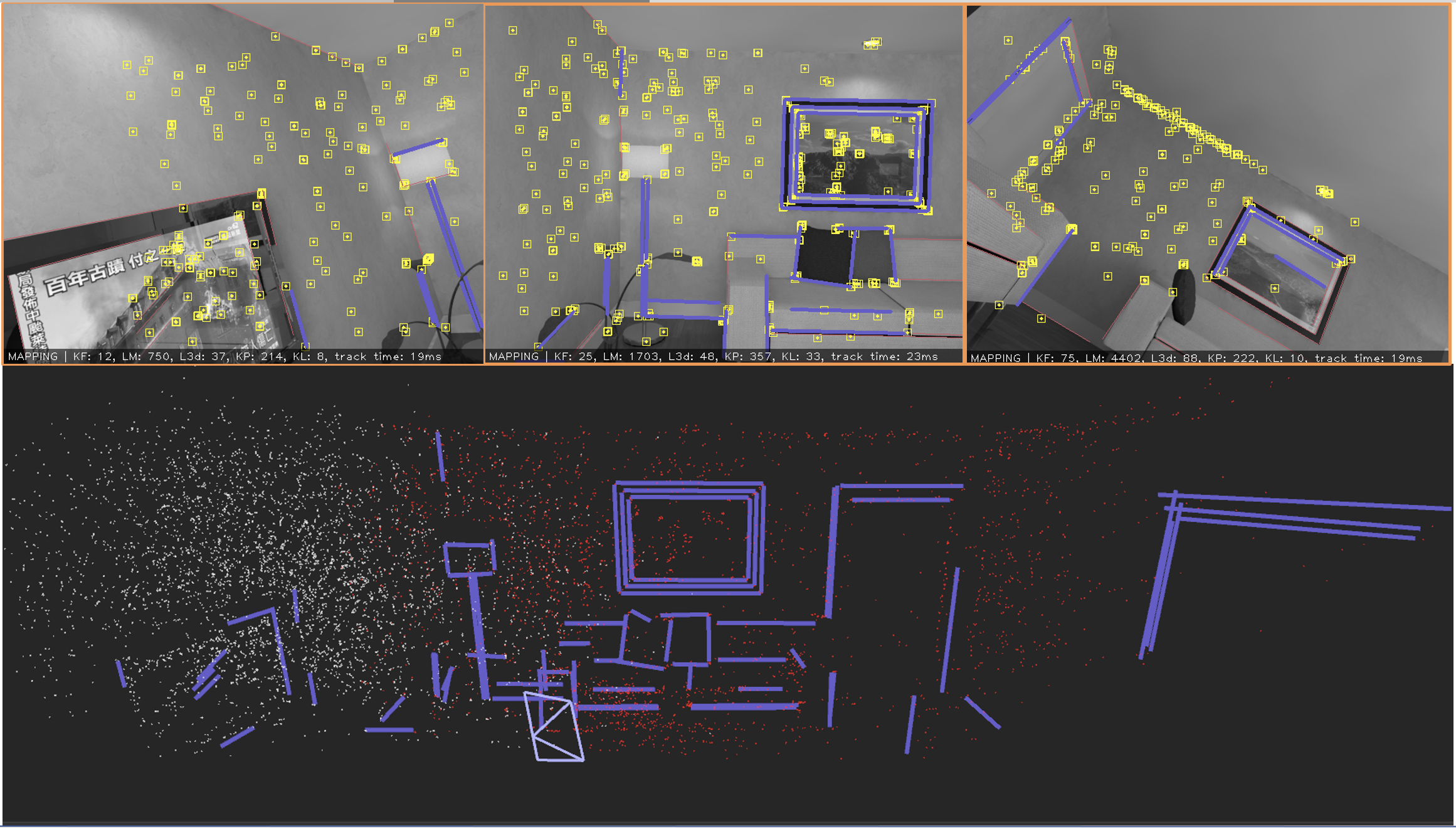
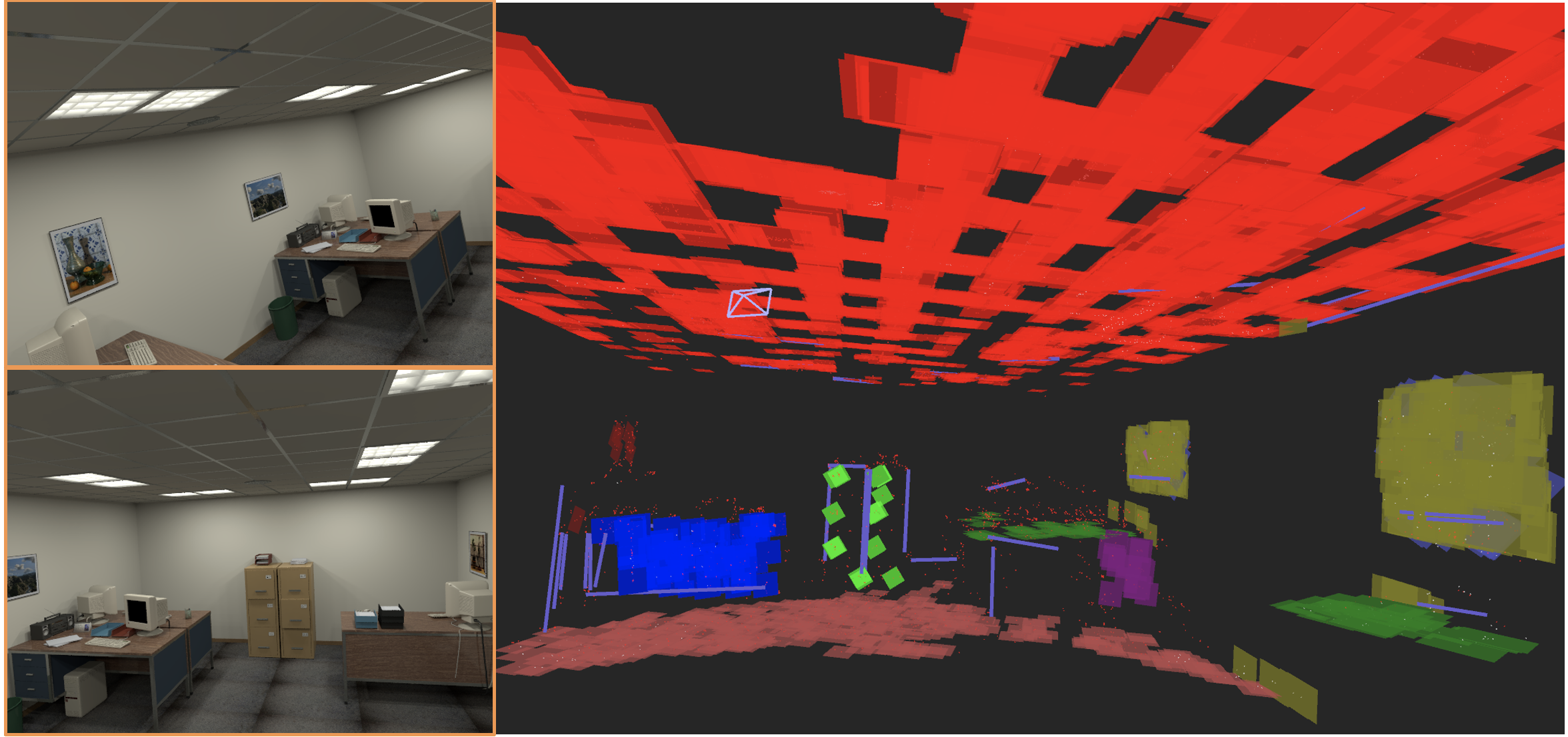
living_room_traj0 and living_room_traj2 (dataset ICL-NUIM)
-
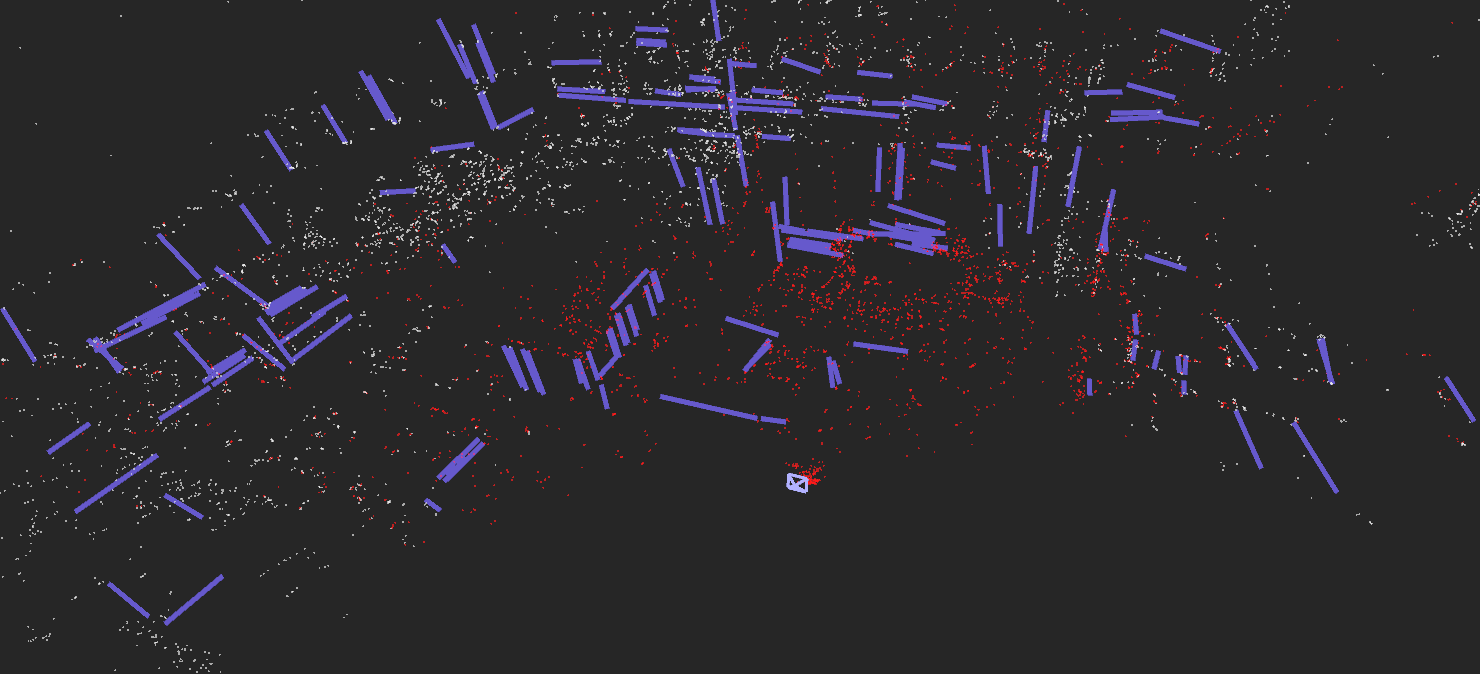
MH_04_difficult (dataset EuRoC MAV)
-
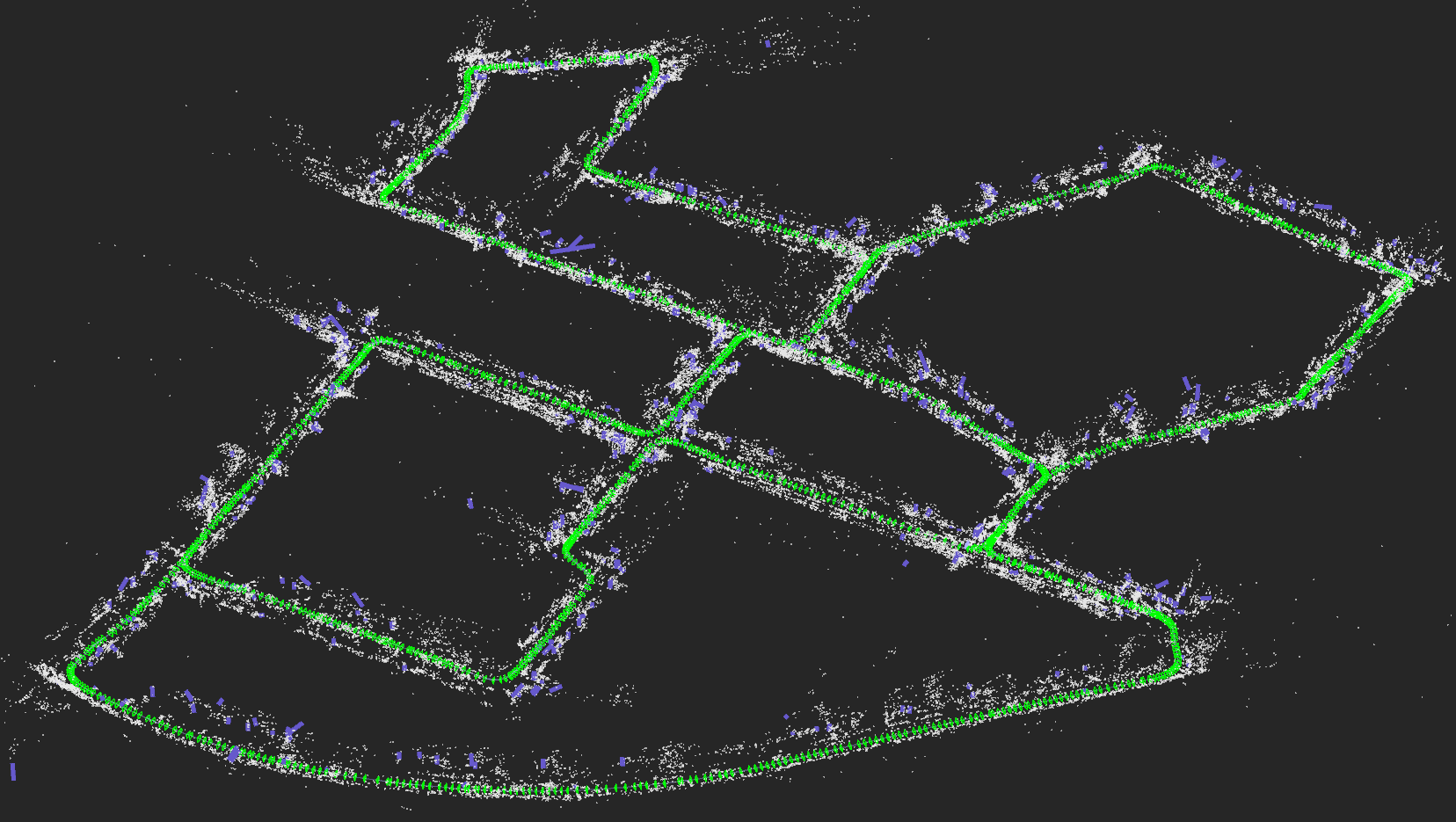
Sequence_00 (data_odometry_gray, dataset KITTI)





-
fr2_pioneer_slam (dataset TUM RGB-D)
-
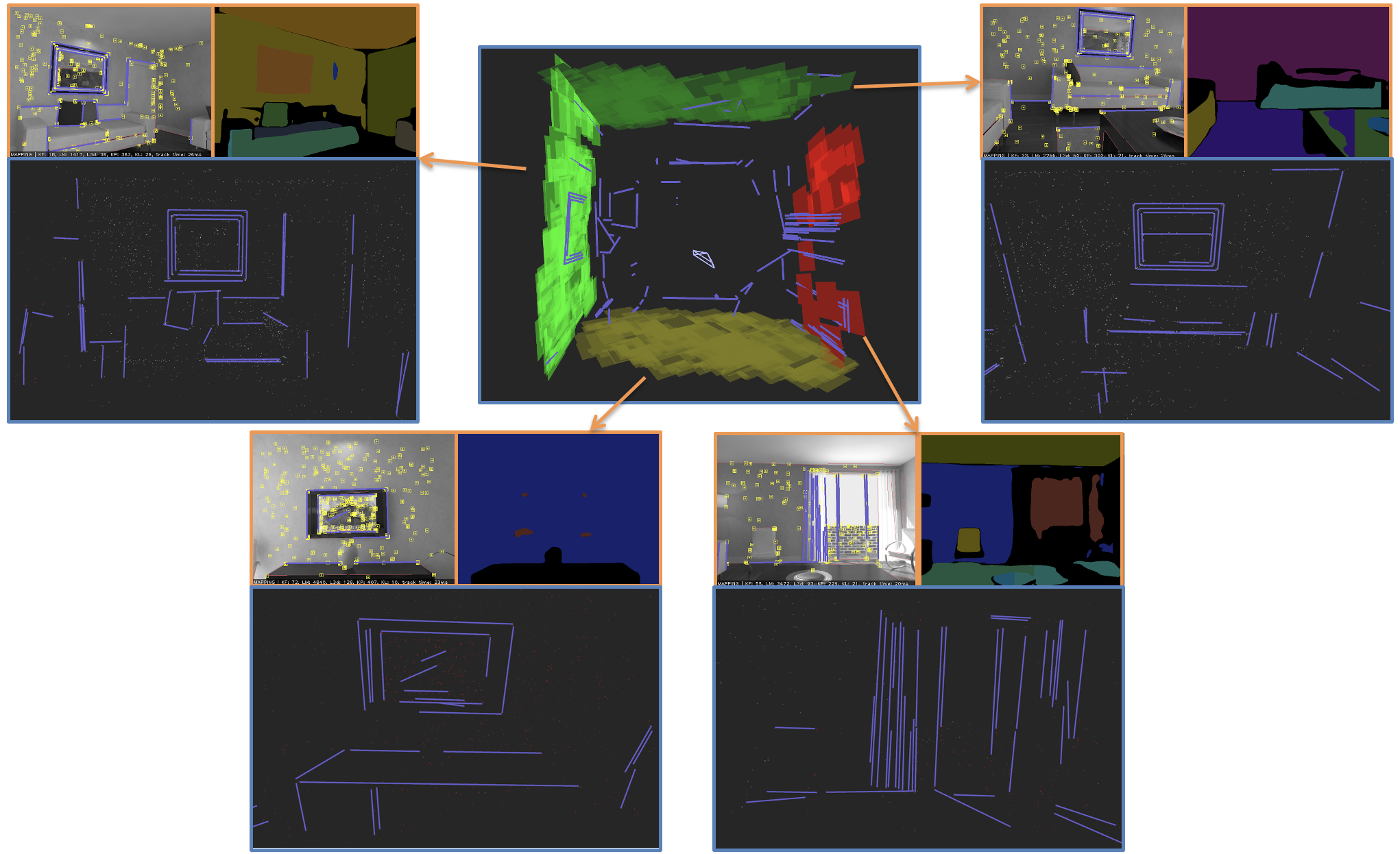
office_room_traj0 (dataset ICL-NUIM)


-
MH_04_difficult (dataset EuRoC MAV)
-
V1_03_difficult (dataset EuRoC MAV)


- Point-Line SLAM is generalized. It can be conducted on all kind of data image sequences.
- For running Planar SLAM, segmentation needs to be done beforehand (see details in below).
- ORB vocabulary is already attached to this repository, see: ./orb_vocab/
The structure-plp-slam code is based on a relatively old version of OpenVSLAM (from early 2021 I think).
You should be able to find everything you need in this documentation:
https://stella-cv.readthedocs.io/en/0.3.9/example.html
Notice the version of this documentation is 0.3.9 which should be the corresponding one to my version of code. Do not use the latest documentation for the revised Stella-slam.
-
For utilizing line segment (LSD + LBD): we develop the code using OpenCV 3.4.6, in which we restored the implementation of LSD because it was removed. Hence, if you use OpenCV 3+, you may need to restore the LSD code yourself.
However, later version of OpenCV restored the LSD (e.g. OpenCV 3.4.16 should work).
-
Other dependencies (g2o, Eigen3, Pangolin, DBoW2, Ubuntu 18.04) are in general similar to ORB-SLAM2.
-
We integrated Graph-Cut RANSAC C++ implementation to our project, which is under BSD license. See https://github.com/danini/graph-cut-ransac.
-
This project does not support using ROS and Docker, at least we haven't tested, for now.
-
An additional plane detector:
This work take PlaneRecNet [3] as the instance planar segmentation CNN (only instance segmentation is used, predicted depth is not used by far). Example segmentation images for different datasets will be provided with a downloading link, see section below -> Run Point-Plane SLAM.
You could also segment images yourself, code please see: https://github.com/EryiXie/PlaneRecNet
mkdir build && cd build
cmake \
-DBUILD_WITH_MARCH_NATIVE=ON \
-DUSE_PANGOLIN_VIEWER=ON \
-DUSE_SOCKET_PUBLISHER=OFF \
-DUSE_STACK_TRACE_LOGGER=ON \
-DBOW_FRAMEWORK=DBoW2 \
-DBUILD_TESTS=OFF \
..
make -j4
(or, highlight and filter (gcc) compiler messages)
make -j4 2>&1 | grep --color -iP "\^|warning:|error:|"
make -j4 2>&1 | grep --color -iP "\^|error:|"
$ ./build/run_tum_rgbd_slam
Allowed options:
-h, --help produce help message
-v, --vocab arg vocabulary file path
-d, --data-dir arg directory path which contains dataset
-c, --config arg config file path
--frame-skip arg (=1) interval of frame skip
--no-sleep not wait for next frame in real time
--auto-term automatically terminate the viewer
--debug debug mode
--eval-log store trajectory and tracking times for evaluation
-p, --map-db arg store a map database at this path after SLAM
-
If you have a crash right after running SLAM (e.g. a segmentation error), try to de-activate BUILD_WITH_MARCH NATIVE (in ccmake .). This is due to the wrong version of g2o.
You could find my version of g2o and DBoW in the link: https://1drv.ms/u/s!Atj7rBR0X5zagZwcFs1oIqXeV5r4Cw?e=pbnNES
-
Visualization issue if you are running latest Ubuntu 20 or 22. As this codebase was developed with Ubuntu 18. When you run the code, the camera maybe not following the tracking path, see: PeterFWS#8
./build/run_tum_rgbd_slam \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/TUM_RGBD/rgbd_dataset_freiburg3_long_office_household \
-c ./example/tum_rgbd/TUM_RGBD_mono_3.yaml
./build/run_kitti_slam \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/KITTI/odometry/data_odometry_gray/dataset/sequences/00/ \
-c ./example/kitti/KITTI_mono_00-02.yaml
./build/run_euroc_slam \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/EuRoC_MAV/MH_01_easy/mav0 \
-c ./example/euroc/EuRoC_mono.yaml
./build/run_tum_rgbd_slam_with_line \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/TUM_RGBD/rgbd_dataset_freiburg3_long_office_household \
-c ./example/tum_rgbd/TUM_RGBD_mono_3.yaml
./build/run_tum_rgbd_slam_with_line \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/ICL_NUIM/traj3_frei_png \
-c ./example/icl_nuim/mono.yaml
./build/run_euroc_slam_with_line \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/EuRoC_MAV/MH_04_difficult/mav0 \
-c ./example/euroc/EuRoC_mono.yaml
./build/run_kitti_slam_with_line \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/KITTI/odometry/data_odometry_gray/dataset/sequences/00/ \
-c ./example/kitti/KITTI_mono_00-02.yaml
First, pre-build a map using (monocular or RGB-D) SLAM:
./build/run_tum_rgbd_slam_with_line \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/TUM_RGBD/rgbd_dataset_freiburg3_long_office_household \
-c ./example/tum_rgbd/TUM_RGBD_rgbd_3.yaml \
--map-db freiburg3_long_office_household.msg
Second, run the (monocular) image localization mode, notice that give the path to the RGB image folder:
./build/run_image_localization_point_line \
-v ./orb_vocab/orb_vocab.dbow2 \
-i /data/TUM_RGBD/rgbd_dataset_freiburg3_long_office_household/rgb \
-c ./example/tum_rgbd/TUM_RGBD_mono_3.yaml \
--map-db freiburg3_long_office_household.msg

-
We provide instance planar segmentation masks and *.txt file, which can be download here (OneDrive shared):
-
TUM RGB-D dataset, besides the folder which saves rgb image, you need to provide folder which saves the segmentation masks and a mask.txt file.
./data/TUM_RGBD/rgbd_dataset_freiburg3_long_office_household/ | |____./rgb/ |____./depth/ . |____./rgb.txt . . |____./mask/ % given by our download link |____./mask.txt % given by our download link -
ICL-NUIM dataset, we customize it the same way as TUM RGB-D dataset.
./data/ICL_NUIM/living_room_traj0_frei_png/ | |____./rgb/ |____./depth/ . . |____./mask/ % given by our download link . |____./rgb.txt % given by our download link |____./depth.txt % given by our download link |____./mask.txt % given by our download link |____./associations.txt % given by our download link |____./groundtruth.txt % given by our download link -
EuRoC MAV dataset, we provide necessary segmentation masks in the downloading link, save the segmentation masks under folder cam0, e.g.:
/data/EuRoC_MAV/V1_02_medium/mav0/cam0/seg/ % given by our download link
- Mapping parameters can be adjusted, see planar_mapping_parameters.yaml.
./build/run_slam_planeSeg \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/TUM_RGBD/rgbd_dataset_freiburg3_structure_texture_far \
-c ./example/tum_rgbd/TUM_RGBD_mono_3.yaml
./build/run_slam_planeSeg \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/ICL_NUIM/living_room_traj0_frei_png \
-c ./example/icl_nuim/mono.yaml
Only V1 and V2 image sequences, due to segmentation CNN failure on factory data sequences MH_01-05, as mentioned in the paper [1].
./build/run_euroc_slam_planeSeg \
-v ./orb_vocab/orb_vocab.dbow2 \
-d /data/EuRoC_MAV/V1_01_easy/mav0 \
-c ./example/euroc/EuRoC_stereo.yaml
It can be easily activated in planar_mapping_parameters.yaml -> Threshold.draw_dense_pointcloud: true.
This is a toy demo (RGB-D only).

Evaluation with EVO tool (https://github.com/MichaelGrupp/evo)
evo_ape tum /data/TUM_RGBD/rgbd_dataset_freiburg3_structure_texture_far/groundtruth.txt ./keyframe_trajectory.txt -p --plot_mode=xy -a --verbose -s
Important flags:
--align or -a = SE(3) Umeyama alignment (rotation, translation)
--align --correct_scale or -as = Sim(3) Umeyama alignment (rotation, translation, scale)
--correct_scale or -s = scale alignment
gdb ./build/run_slam_planeSeg
run -v ./orb_vocab/orb_vocab.dbow2 -d /data/TUM_RGBD/rgbd_dataset_freiburg3_structure_texture_far -c ./example/tum_rgbd/TUM_RGBD_rgbd_3.yaml