ROS package that uses a Gazebo virtual camera to retrieve an image from a simulated environment that will be displayed in the ambient using a projector.
Note: welding projection requires:
- Gazebo 7.0.1 with PR 2058
- SDFormat with PR 248
- gazebo_ros_pkgs with PR 374 and 375
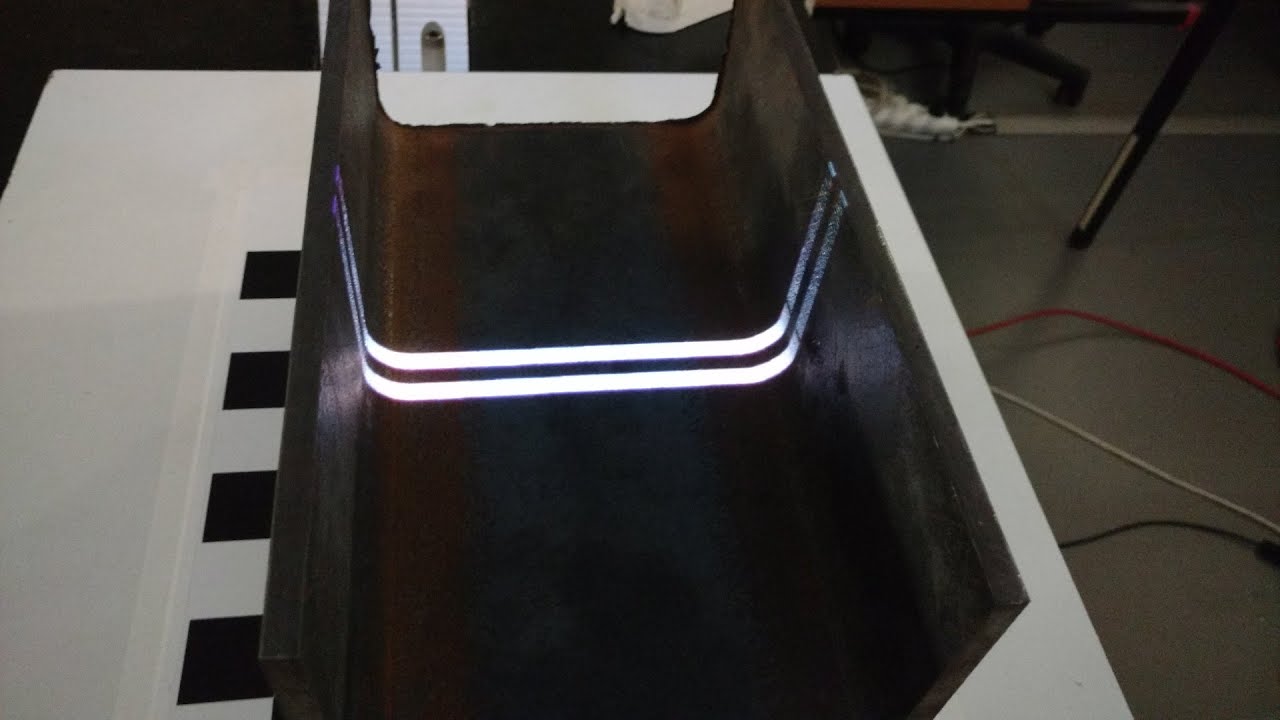
Video 1: Welding shape projection
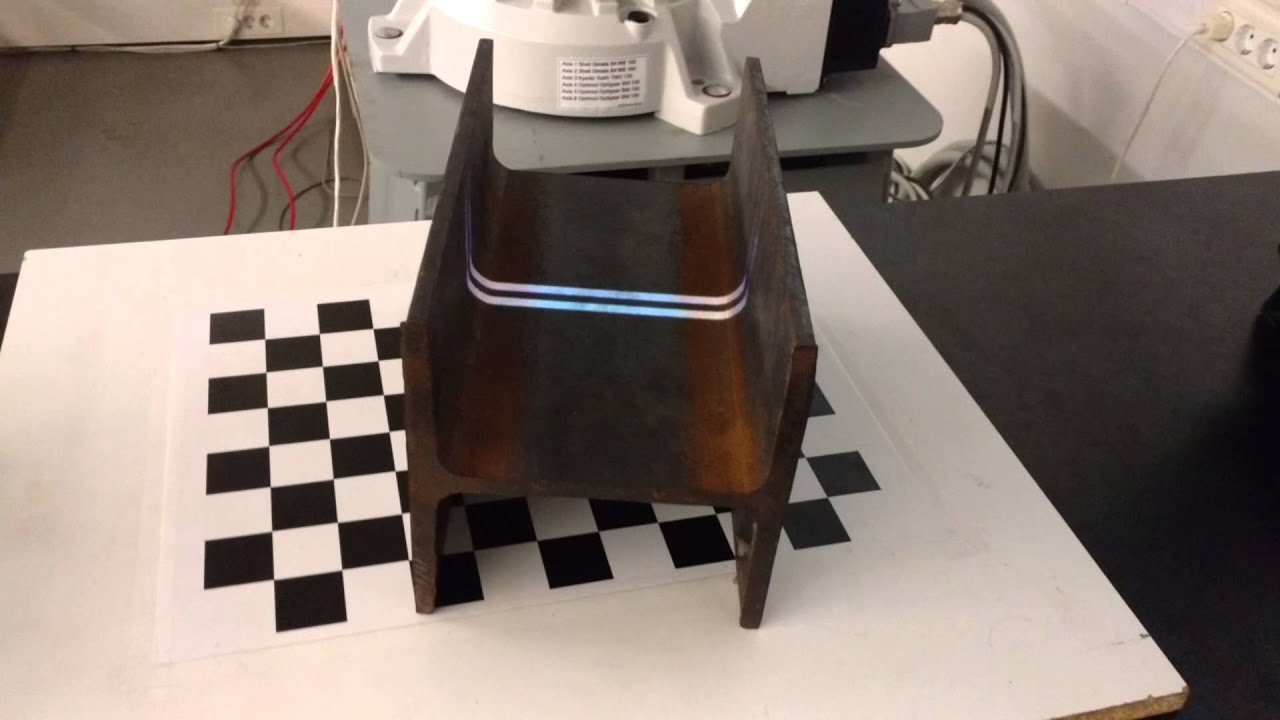
Video 2: Welding shape projection with object placement

Figure 1: Wall projection