Overview of the different files submitted in the project
notebook.ipynb: IPython notebook which houses all the codeoutput_images: A folder containing images throughout the project pipeline.svc3.pkl: Trained LinearSVC model, loaded using picklescaler3.pkl: StandardScaler, loaded using pickleclassifier2.h5: Trained convolutional neural network, loaded using kerashog-classifier.h5: Trained neural network #2, loaded using kerastest3.mp4: A test video using the final project pipeline
Please watch it here!
Note: All the portions mentioned below are within the same python notebook, notebook.ipynb
Here is an exploration of the training images provided by Udacity:

I tried different color spaces for extracting the 'best' data. Here are three major things that I spent the most time on:
- YCrCb color space

-
Histogram Equalization: For this I tried two different methods,
cv2.equalizeHist()andskimage.exposure.equalize_adapthist(). Regular equalization worked better than an adaptive one.
-
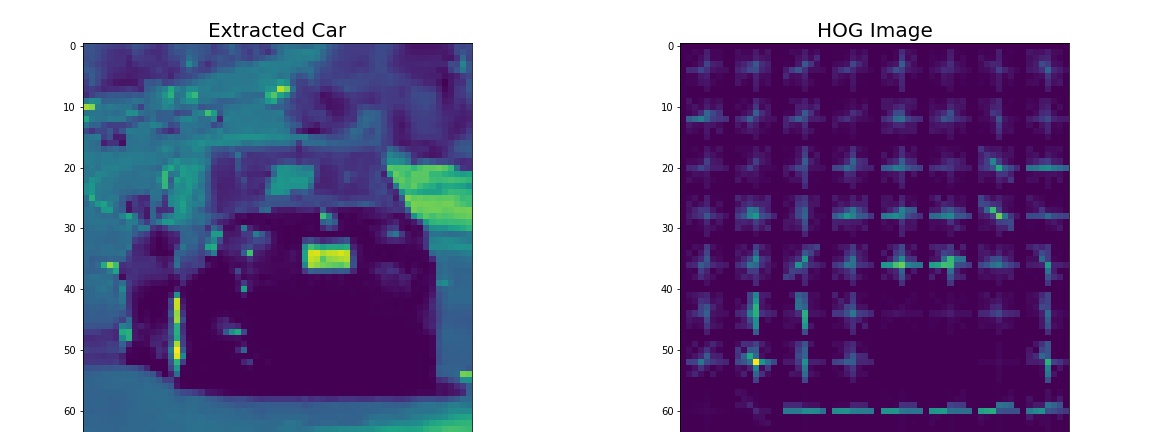
HOG features: For HOG, I tried VARIOUS combinations of parameters. By hit and trial, the worst seemed to be RGB and the best results came from YCrCb color space, 12 orientations, 8 pixels per cell, and 2 cells per block.


I spent most of my time monkeying around with different ways to build a model. I show 3 different models in my notebook, and the final output is obtained using a LinearSVC classifier with scaled and normalized input features.
Model1: LinearSVC classifier: A simple classifier which worked very efficiently because of the nature of my data. It reached the highest accuracy out of all the models I tried, and works well on the final video. However, its drawback in this project was that it was too difficult to combine with other models like neural networks. In another attempt, I would try using the multilayer perceptron classifier.
Model2: Convolutional Neural Network I trained it using histogram-equalized images. The results were excellent sometimes, but generated waaay too many false positives under tree shadows. However, it worked beautifully on detecting cars under bridges and in sudden glimmers of sunlight, as well as cars which were very far away.
Model3: Deep Neural Network exclusively using HOG features: It works well when combined with another convolutional layer, to get the best of both worlds.
To see the architecture, please see the notebook.
My personal sliding windows function finds grids three times each for 3 different sizes: 64x64, 128x128 and 192x192, as drawn by the slide_window2() function. But eventually for simplicity, I used a simple grid of 128x128 pixels:

There are two functions in the project to detect vehicles, one uses a combination of 2 deep neural networks (search_windows_new()) and the other uses the LinearSVC classifer (find_cars()).
The neural network created waay too many false positives when run on the final image, AND it was very inefficient because I couldn't figure out how to subsample the HOG features:

Let's say we detect these boxes:

Now we create a binary image of the same shape as input. For each pixel in a detected box, increase its value by 1. Then, we put a threshold on the pixels to isolate detected vehicles. Finally, we can use the amazing function ndimage.measurements.label() to mark individual cars! This is the final stage of our labeled heatmap, but I've also put a preliminary heatmap in the final video as well.

After this, we can now draw boxes around the cars much more easily:

def process_image(image):
global previous_detections
ystart = 380
ystop = 650
scale = 1
color_space = 'YCrCb' # Can be RGB, HSV, LUV, HLS, YUV, YCrCb
orient = 12 # HOG orientations
pix_per_cell = 8 # HOG pixels per cell
cell_per_block = 2 # HOG cells per block
hog_channel = 'ALL' # Can be 0, 1, 2, or "ALL"
spatial_size = (16, 16) # Spatial binning dimensions
hist_bins = 32 # Number of histogram bins
# Detecting vehicles using raw image data and HOG features
vehicle_detections = find_cars(image, ystart, ystop,
scale, svc, X_scaler,
orient, pix_per_cell, cell_per_block,
spatial_size, hist_bins)
# Updating previous frames' detections with new frame, and removing frames that are too old
previous_detections.append(vehicle_detections)
previous_detections = previous_detections[-10:]
blank = np.zeros_like(image[:,:,0])
for frame in previous_detections:
for window in frame:
blank[window[0][1]:window[1][1], window[0][0]:window[1][0]] += 1
threshold = (blank < 3)
blank[threshold] = 0
# Label the different cars detected in image
labels, n = label(blank)
boxes = []
# For each car, define its bounding boxes
for i in range(1, n+1):
center = center_of_mass(blank, labels, i)
minimax = int(center[0] - 50)
minimay = int(center[1] - 64)
maximax = int(center[0] + 50)
maximay = int(center[1] + 64)
pos = ((minimay, minimax), (maximay, maximax))
boxes.append(pos)
new_blank = cv2.resize(blank, (266, 150))
new_labels = np.dstack((new_blank*20, new_blank, new_blank))
#return new_labels
x_offset=y_offset=50
l_img = draw_boxes(image, boxes)
l_img[y_offset:y_offset+new_labels.shape[0], x_offset:x_offset+new_labels.shape[1]] = new_labels
# Draw the boxes on original image
return l_imgThe current pipeline suffers from several issues:
- It doesn't do an amazing job of detecting the white car. This can be solved with further tuning of the threshold and limiting/increasing the number of previous frames, exploring color spaces in even more detail etc, but that comes with other costs. The current pipeline works well and is generalizable to a lot of vehicles though.
- The processing time for each frame is still >1 second making it impractical for real-time applications, although I've brought it down from 4 seconds (while using bulky neural networks). This is because of a sliding window approach for spatial and histogram features. The solution to this is to use YOLO (you only look once) as found here: YOLO
- When I used another model that uses histogram equalized images, its ability to detect cars in shadows and under sudden bright lights increased dramatically. With more work I can combine these models and find even more predictions. But it will still fall short of YOLO.