This package is a collection of GICP-based fast point cloud registration algorithms. It constains a multi-threaded GICP as well as multi-thread and GPU implementations of our voxelized GICP (VGICP) algorithm. All the implemented algorithms have the PCL registration interface so that it can be used as an inplace replacement for GICP in PCL.
- FastGICP: multi-threaded GICP algorithm (~40FPS)
- FastGICPSingleThread: GICP algorithm optimized for single-threading (~15FPS)
- FastVGICP: multi-threaded and voxelized GICP algorithm (~70FPS)
- FastVGICPCuda: CUDA-optimized voxelized GICP algorithm (~120FPS)
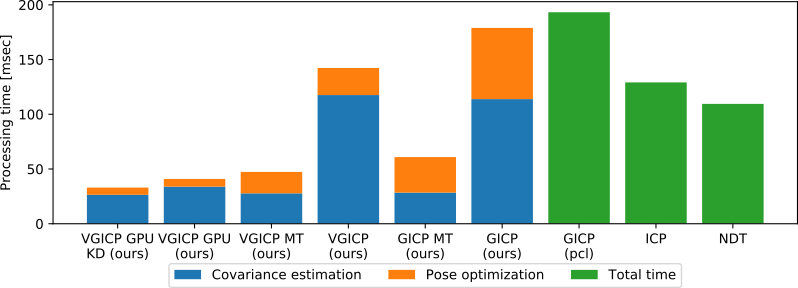

CPU:Core i9-9900K GPU:GeForce RTX2080Ti
roscd fast_gicp/data
rosrun fast_gicp gicp_align 251370668.pcd 251371071.pcdtarget:17249[pts] source:17249[pts]
--- pcl_gicp ---
single:116.098[msec] 100times:11157.4[msec]
--- pcl_ndt ---
single:168.511[msec] 100times:15957.2[msec]
--- fgicp_st ---
single:106.775[msec] 100times:10525.3[msec] 100times_reuse:6719.9[msec]
--- fgicp_mt ---
single:39.8451[msec] 100times:3159.26[msec] 100times_reuse:2279.86[msec]
--- vgicp_st ---
single:111.046[msec] 100times:8228.94[msec] 100times_reuse:4354.57[msec]
--- vgicp_mt ---
single:23.0753[msec] 100times:2345.63[msec] 100times_reuse:1381.06[msec]
--- vgicp_cuda (parallel_kdtree) ---
single:16.3572[msec] 100times:1585.69[msec] 100times_reuse:783.953[msec]
--- vgicp_cuda (gpu_bruteforce) ---
single:47.8433[msec] 100times:3235.27[msec] 100times_reuse:1582.99[msec]
If you use this package, please cite the following paper:
- Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno, Voxelized GICP for fast and accurate 3D point cloud registration, 16th Intelligent Autonomous Systems Conference (IAS16).
Kenji Koide, k.koide@aist.go.jp
Robot Innovation Research Center, National Institute of Advanced Industrial Science and Technology, Japan [URL]