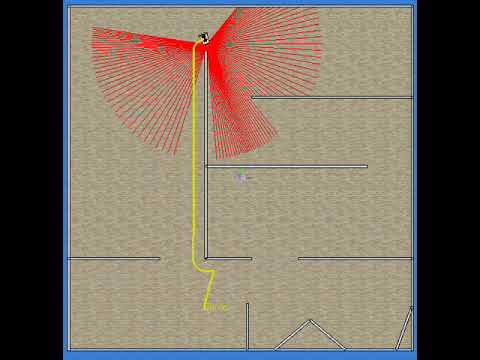
The basic idea is to move along a line connecting the target and initial point and in the case of being near to an obstacle follow its contour and circumnavigate it. The program should work as follows:
- Find the line
lconnecting initial and target position. - Rotate towards the goal.
- Move towards the goal along the
lline until reaching an obstacle or the goal. If the goal is reached, then stop. - When the robot reaches an obstacle, save the distance to the goal
d. - Use the
moving along the wallscontroller to avoid the obstacle - Depart immediately when the robot is on the
lline again and the distance to the goal is lower thand. - Go to step 2.
- Matlab
- Peter Corke’s RVC toolbox
- CoppeliaSim simulator
- Matlab bindings for CoppeliaSim
Important
It is required to use a fairly recent version of Matlab, versions older than 2011 may cause problems.
- Download
CoppeliaSim EDUand unpack it in the~/ws_emorworkspace directory. - Download EMOR tutorials repository and unzip it in
~/ws_emor.
Copy the following three files from the directory of the CoppeliaSim to the directory named youbot within your local copy of EMOR tutorials repository downloaded above.
The three files you need to copy are:
remApi.m: located in{CoppeliaSim_path}/programming/remoteApiBindings/matlab/matlab
Note
In the newest version of CoppeliaSim, the files may be located in {CoppeliaSim_path}/programming//legacyRemoteApi/remoteApiBindings/matlab/matlab
remoteApiProto.m: located in{CoppeliaSim_path}/programming/remoteApiBindings/matlab/matlabremoteApi.so(if you use Linux) orremoteApi.dll(if you use Windows) orremoteApi.dylib(if you use a Mac). If you have a choice between a 32-bit or 64-bitremoteApi, pick the one that corresponds to your Matlab install.
Important
If you have 32-bit Matlab, pick the 32-bit remoteApi, even if your kernel is 64-bit.
The file is located in {CoppeliaSim_path}/programming/remoteApiBindings/lib/lib You will find these files in the directory containing the CoppeliaSim app. Look in the programming/remoteApiBindings/lib/lib and programming/remoteApiBindings/matlab/matlab subdirectories of the CoppeliaSim app directory (although this can change from version to version). You must copy these files to the youbot directory within your copy of EMOR tutorials repository.
-
Run Matlab and change the current directory to the youbot directory (in Matlab Command Window), e.g. on Linux/Mac:
`cd ~/ws_emor/emor_trs/youbot`
-
Then type (in Matlab):
vrep=remApi('remoteApi'); vrep.delete();
In MATLAB command window execute:
start_robotgoal_x = 1;
goal_y = 4;
run_simulation(@bug2, false, [goal_x, goal_y])