A lightweight kinematics simulation of IAI's Boxy robot.
Using catkin_tools and wstool in a new workspace for ROS Indigo installed on Ubuntu 14.04:
source /opt/ros/indigo/setup.bash # start using ROS Indigo
mkdir -p ~/my_ws/src # create directory for workspace
cd ~/my_ws # go to workspace directory
catkin init # init workspace
cd src # go to source directory of workspace
wstool init # init rosinstall
wstool merge https://raw.githubusercontent.com/code-iai/iai_boxy_sim/master/rosinstall/catkin.rosinstall
# update rosinstall file
wstool update # pull source repositories
rosdep install --ignore-src --from-paths . # install dependencies available through apt
catkin build # build packages
source ~/my_ws/devel/setup.bash # source new overlay
Note, the above instructions have been tested to also work under ROS Kinetic installed on Ubuntu 16.04. Just replace any occurance of indigo with kinetic.
There were some major design decisions that went into this simulator. Some of them diverge from typical ROS standards:
- Model the odometry as 3 robots joints in the URDF. As a result, the odometry joints get published over the
/joint_statestopic, and the corresponding TF frames get published by therobot_state_publisher. Rational: This treats base joints just like arm joints. KISS principle. - Have only one command topic for the entire robot (including odometry). The simulator (and the actual robot) will take care of delegating the respective sub-commands to the correct body parts or joints. As Alexis calls it: "Drinking from the fire hose." Rational: This ensures that whole-body command are sent together and arrive at the low-level controllers at the same time with the same time stamps.
- Use
sensor_msgs/JointStateas message type for the command topic. Rational: Use readily available message definitions instead of defining custom messages. Again, KISS principle. - Allow sending of commands for only parts of the body. Rational: This speeds up conducting experiments with only parts of the robot.
In a first shell, run:
roslaunch iai_boxy_sim boxy.launch # start simulation
In a second shell, enter:
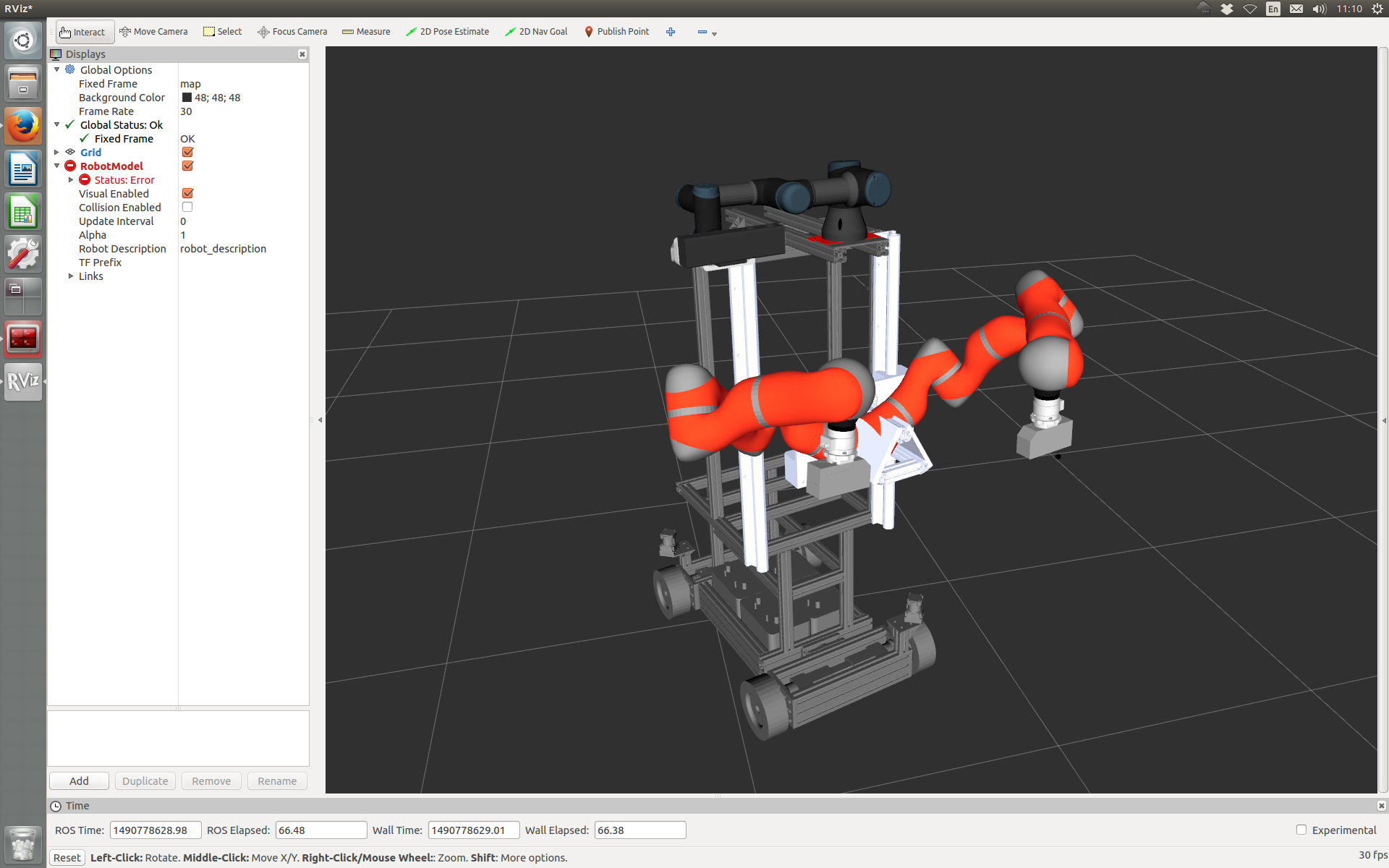
rviz # start rviz
In rviz, add a plugin of type RobotModel, and select as Fixed_Frame the frame map.
There are two test bash-scripts that move parts of the robots. The scripts just publish command messages over the ~command topic that the simulator subscribes to.
Moving the arms:
rosrun iai_boxy_sim move_armsWhich does this:
rostopic pub /boxy/commands sensor_msgs/JointState "header:
seq: 0
stamp: {secs: 0, nsecs: 0}
frame_id: ''
name: ['right_arm_4_joint', 'left_arm_0_joint', 'left_arm_1_joint']
position: [0, 0, 0]
velocity: [-0.1, -0.1, -0.1]
effort: [0]" -r 100Moving the base:
rosrun iai_boxy_sim move_baseWhich does this:
rostopic pub /boxy/commands sensor_msgs/JointState "header:
seq: 0
stamp: {secs: 0, nsecs: 0}
frame_id: ''
name: ['odom_x_joint', 'odom_z_joint']
position: [0, 0]
velocity: [0.2, 0.1]
effort: [0]" -r 100As you can see, the simulator correctly moves the command joints using the name fields.
Note: Even if you only want to send velocity commands, it is necessary to fill the position field with the appropriate amount of numbers. The efforts field is ignored.
The simulator has a service interface to set the robot's joint state. This feature fascilitates automated testing.
To illustrate, there is another bash script to test this feature:
rosrun iai_boxy_sim reset_simWhich does this:
rosservice call /boxy/set_joint_states "state:
header:
seq: 0
stamp: {secs: 0, nsecs: 0}
frame_id: ''
name: ['odom_x_joint', 'odom_z_joint', 'right_arm_4_joint', 'left_arm_0_joint', 'left_arm_1_joint']
position: [0.1, 0.3, -1.3, -1.56, 0.84]
velocity: [0, 0, 0, 0, 0]
effort: [0]"The robot should now be back at its initial position. As you can see, the service supports setting partial joint states.
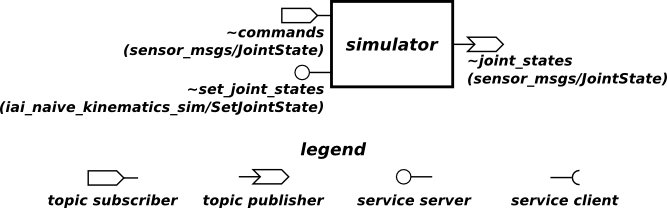
~commands(sensor_msgs/JointState): instantaneous motion commands to joints; currently onlyvelocityfield is used; fieldsname,position,velocityneed to have lists of equal length; partial commands are supported
~joint_states(sensor_msgs/JointState): complete joint state of the simulated robot
~set_joint_states(iai_naive_kinematics_sim/SetJointState): set next joint of the simulated robot; partial commands are supported
to be done.
- Position commands are not support, yet. There are plans to support this.
- Efforts are not simulated. This will not be supported in the future.