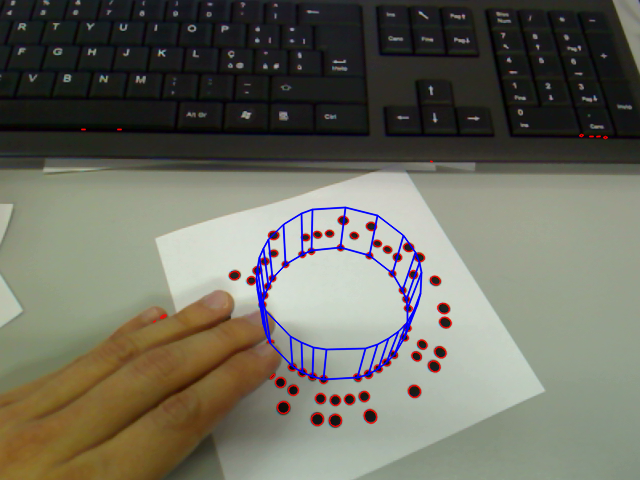
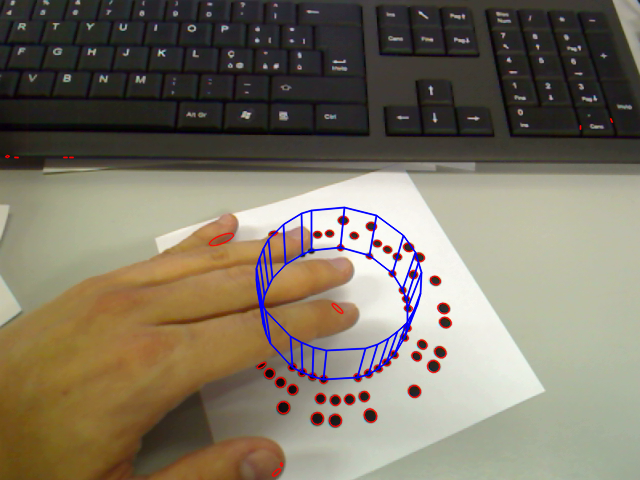
RUNETag is a fiducial marker system which heavily relies on the robust framework of cyclic codes to offer superior occlusion resilience, accurate detection and robustness against various types of noise.
Our tags are composed by a set of circular high-contrast features (dots) spatially arranged into concentric layers. The reciprocal dot positions between layers is studied to allow the identification and pose estimation of the marker even with severe occlusions. Additionally, the marker interior is left free for any additional user payload.
For technical aspects on its inner working, please refer to:

Latest version of RUNEtag can be downloaded here. Given the research nature of this work, consider it still under development. Feel free to experiment and/or improve the code for your specific application. If your are using it for research purposes, please consider citing our work.
See the license below for additional details.
RUNETag uses the following third-party libraries:
- OpenCV
- WinNTL (Included in the bundle)
- Boost (For RUNEtagdetect executable)
- Qt toolkit (For RUNETagGenerator)
Additionally, to build the library you will need CMake version 2.8 or higher.
- Run the CMake build system to configure your build environment
- Compile the source code
- Run the codegen executable. A file called codes.txt will be created in the current directory
- Run RUNETagGenerator and open the file codes.txt. Tags can now be browsed and personalized
- Once a tag is selected, save it to generate two files:
<tagname>.pdfand<tagname>.txt - Print
<tagname>.pdfensuring that no scaling occurs - Calibrate your camera and run RUNEtagdetect, using
<tagname>.txtas model file and with the appropriate camera calibration parameters
To cite our paper, please use the following:
@INPROCEEDINGS{Bergamasco2011,
author={Bergamasco, F. and Albarelli, A. and Rodola, E. and Torsello, A.},
booktitle={Computer Vision and Pattern Recognition (CVPR), 2011 IEEE Conference on},
title={RUNE-Tag: A high accuracy fiducial marker with strong occlusion resilience},
year={2011},
pages={113-120},
doi={10.1109/CVPR.2011.5995544},
ISSN={1063-6919},
month={June}
}
The MIT License (MIT)
Copyright (c) 2015 Filippo Bergamasco
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.