Udacity Self-Driving Car Engineer Nanodegree Program
This is a demo of path planning for autonomous vehicles for highway driving. The driver program has to drive the car in simulator around circular highway track. It is given waypoints but has to adapt the speed/ to follow the track, avoid crashing to other vehicles and plan 'comfortable' paths within reasonable limits of acceleration and jerk.
It is given localisation data about the of the car and sensor fusion data about other vehicles
You can download the simulator from here
The goal is to safely navigate around a virtual highway with other traffic that is driving +-10 MPH of the 50 MPH speed limit.
The driver program is provided with the car's localization and sensor fusion data, there is also a sparse list of waypoints to follow around the highway.
The car should try to go as close as possible to the 50 MPH speed limit, which means passing slower traffic when possible. Other cars will try to change lanes too. The car should avoid hitting other cars at all cost as well as driving inside of the marked road lanes at all times, unless going from one lane to another.
The car should be able to make one complete loop around the 6946m highway. Since the car is trying to go 50 MPH, it should take a little over 5 minutes to complete 1 loop.
Also the car should not experience total acceleration over 10 m/s^2 and jerk that is greater than 50 m/s^3.
The map of the highway is in data/highway_map.txt
Each waypoint in the list contains [x,y,s,dx,dy] values.
x and y are the waypoint's map coordinate position, the s
is Frenet
coordinate, the distance along the road to get to
that waypoint in
meters, the dx and dy values define the unit normal vector
pointing outward of the highway loop.
The highway's waypoints loop around so the Frenet s value,
distance along the road, goes from 0 to 6945.554.
- Clone this repo.
- Make a build directory:
mkdir build && cd build - Compile:
cmake .. && make - Run it:
./path_planning
-
The car uses a perfect controller and will visit every (x,y) point it recieves in the list every .02 seconds. The units for the (x,y) points are in meters and the spacing of the points determines the speed of the car. The vector going from a point to the next point in the list dictates the angle of the car. Acceleration both in the tangential and normal directions is measured along with the jerk, the rate of change of total Acceleration. The (x,y) point paths that the planner recieves should not have a total acceleration that goes over 10 m/s^2, also the jerk should not go over 10 m/s^3.
-
There will be some latency between the simulator running and the path planner returning a path. During this delay the simulator will continue using points that it was last given.
previous_path_x, andprevious_path_yare passed from simulator and are the path points that the car has not passed yet since last planning iteration. -
A really helpful resource to smooth trajectories is splines
- cmake >= 3.5
- All OSes: click here for installation instructions
- make >= 4.1
- Linux: make is installed by default on most Linux distros
- Mac: install Xcode command line tools to get make
- Windows: Click here for installation instructions
- gcc/g++ >= 5.4
- Linux: gcc / g++ is installed by default on most Linux distros
- Mac: same deal as make - [install Xcode command line tools]((https://developer.apple.com/xcode/features/)
- Windows: recommend using MinGW
- uWebSockets
- Run either
install-mac.shorinstall-ubuntu.sh. - If you install from source, checkout to commit
e94b6e1, i.e.git clone https://github.com/uWebSockets/uWebSockets cd uWebSockets git checkout e94b6e1
- Run either
Here is an example video (sped-up 4 times) of how the planner performs:
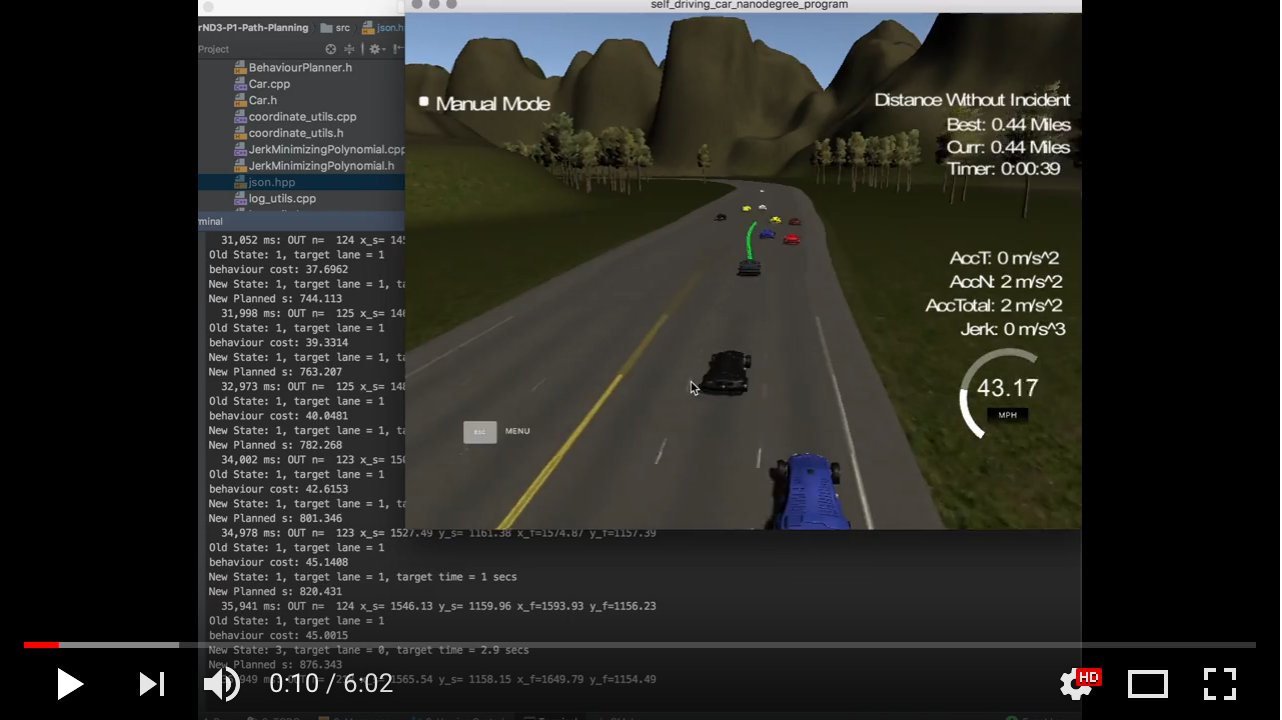
The implementation uses cubic splines to smooth the path represented by the list of waypoints.
The behaviour planner uses cost function based selection approach looking at time horizons from 1 to 5 seconds into the future, extrapolating positions of other cars, chooses acceleration and lane to better match goals.
After behaviour planner has choosen a high-level maneuvre (keep lane, prepare to change lane, change lane) the trajectory generation module does a quick sampling based search to choose optimal trajectory in time which match the goals described above.
In the video we see that the car can complete a few laps fully autonomously successfully avoiding other vehicles and trying to stay close to about 44 miles per hour speed.
The current implementation planning code runs in about 20 milliseconds on Intel Core i7 2.8Ghz CPU.
What can be added is ability to re-plan from earlier time horizon. At the moment the existing trajectory is extended. But because it relies on historical assumptions from few seconds ago it may no longer be relevant to developing road situation. This is especially obvious when other cars change speed. Or if other cars initiate lane changing maneuvres which conflict with pre-planned trajectory.