
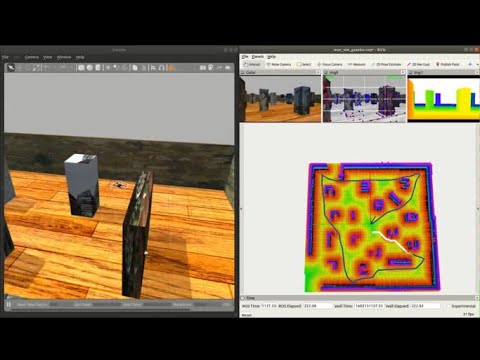
This Kit provides an end to end simulation solution for MAV visual SLAM and path planning researches.
In this work, several features are added to the default PX4 Gazebo Simulator:
-A realsense D435 model (based on realsense_gazebo_plugin)
-Modified IRIS MAV model
-Several structured/unstructured simulation world
-Keyborad control support
The work has been verified on Ubuntu 18.04 + ROS melodic environment
We strongly recommend to you to run this simulation with CUDA supported graphic card!
| manual control | Click and fly navigation |
|---|---|
 |
 |
Install pre-requires:
sudo apt-get install ros-melodic-mavros ros-melodic-mavros-extras ros-melodic-mavros-msgs libncurses5-dev python3-pip libgstreamer1.0-dev python-jinja2 python-pip python-testresources libignition-math2 libgazebo9-dev
pip3 install --user empy toml numpy packaging jinja2
pip install numpy toml empy packaging
sudo apt upgrade libignition-math2
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
sudo bash ./install_geographiclib_datasets.sh
Downloadn and install the PX4 (1.11.0)
git clone https://github.com/PX4/PX4-Autopilot.git
cd PX4-Autopilot/
git checkout 71db090
git submodule sync --recursive
git submodule update --init --recursive
bash ./Tools/setup/ubuntu.sh
sudo apt upgrade libignition-math2
make px4_sitl_default gazebo
Clone this repository to catkin src folder say: ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/HKPolyU-UAV/E2ES.git
Install 3rd Part Library
cd ~/catkin_ws/src/e2es/3rdPartLib
sudo ./install3rdPartLib.sh
Compile
cd ~/catkin_ws/
catkin_make
By default ROS_WORK_SPACE_PATH is ~/catkin_ws and PX4_Firmware_PATH is ~/PX4-Autopilot
If Not, Edit the path in E2ES/sim.sh script(Line 1 to 4)
export GAZEBO_RESOURCE_PATH=$GAZEBO_RESOURCE_PATH:~/catkin_ws/src/e2es/gazebo
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/catkin_ws/src/e2es/gazebo/models
export GAZEBO_PLUGIN_PATH=$GAZEBO_PLUGIN_PATH:~/catkin_ws/devel/lib
cd ~/PX4-Autopilot
to
export GAZEBO_RESOURCE_PATH=$GAZEBO_RESOURCE_PATH:ROS_WORK_SPACE_PATH/src/e2es/gazebo
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:ROS_WORK_SPACE_PATH/src/e2es/gazebo/models
export GAZEBO_PLUGIN_PATH=$GAZEBO_PLUGIN_PATH:ROS_WORK_SPACE_PATH/devel/lib
cd PX4_Firmware_PATH
Run the simulator
roscd e2es
./sim.sh
Using keyboard to control the MAV in simulator
roslaunch e2es keyboard_ctr.launch

You can use the FLVIS-glmapping-FUXI(localization-mapping-planning kits) navigation system.
The first step is to install FLVIS, glmapping and FUXI accordinly.
Then start the simulator localization mapping and planning kit in sequence.
roscd e2es
./sim.sh
roslaunch e2es flvis.launch
roslaunch e2es glmapping.launch
roslaunch e2es fuxi.launch
You can use the 2D-Nav-Goal in RVIZ to publish your destination.
This work are based on PX4 Projcet and realsense_gazebo_plugin
Shengyang Chen(Dept.ME,PolyU): shengyang.chen@connect.polyu.hk
Han Chen(Dept.AAE,PolyU):stark.chen@connect.polyu.