Official Pytorch implementation for Visual-Semantic Graph Attention Network for Human-Object Interaction Detecion.
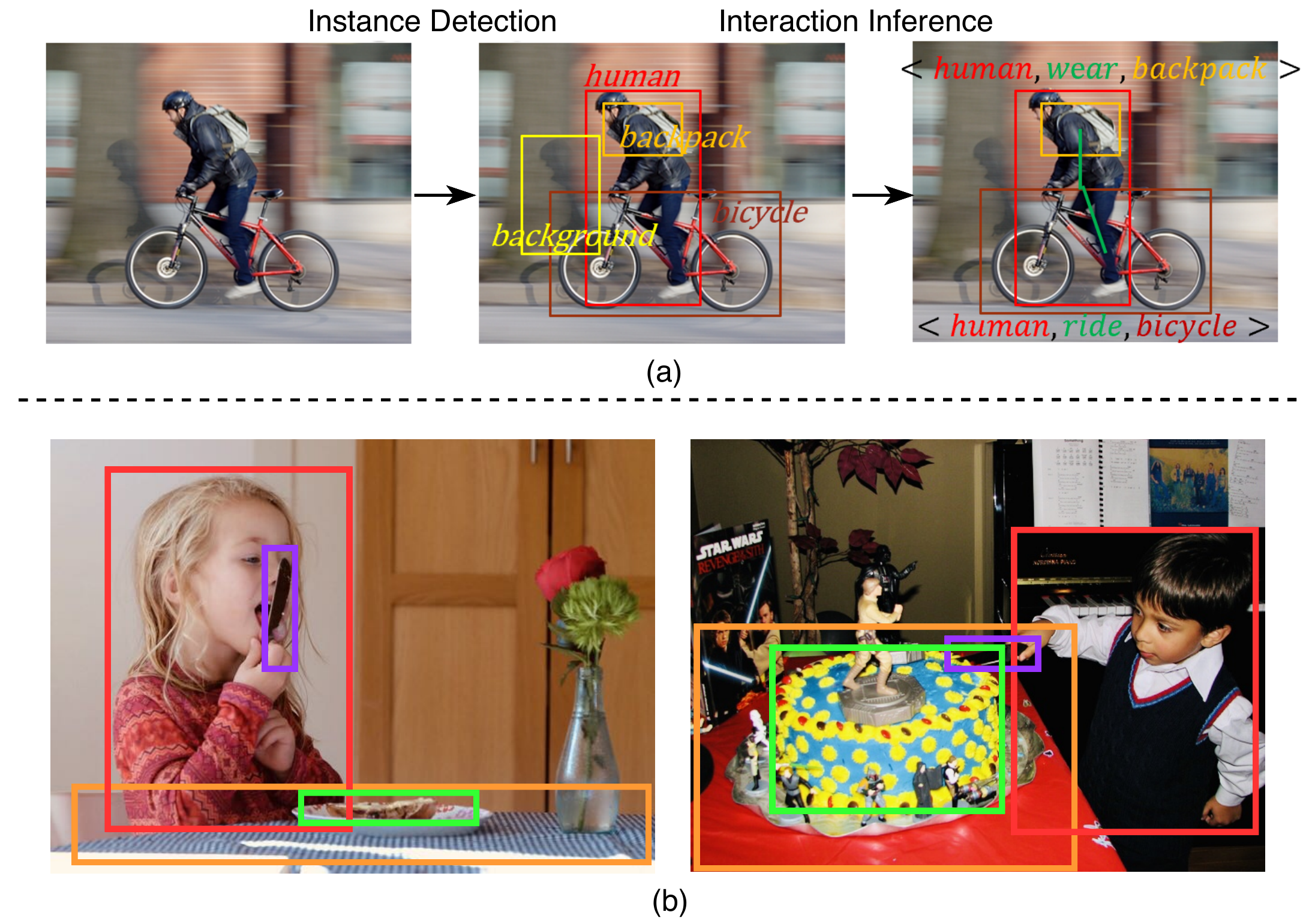
A) Generally, HOI detection includes two steps: Object detection && Interaction Inference.
B) As for Interaction Inference, many previous works mainly focused on features of the human as well as the directly interacted object.
C) Our insights: Not only the primary relations but also the subsidiary relations will provide significant cues to do intercation inference: Contextual Information.
-
Consider the left image on Fig. b. If just focusing on the features of the girl and the directly interacted knife, it seems enough for the model to infer the action 'hold' but the subsidiary relations that the spatial relationship in (knife, cake) or (knife,desk) can make the model more certain that the 'cut' action has the low probabilty to happen.
-
Consider the right image on Fig.b. If the model ignores the contextual infromation while just focus on the primary object pair (boy,knife), it is hard for it to distinguish whether the action is 'stab' or 'cut'. However, if we let the model know there is cake here(semantic message) as well as the spatial relationship of subsidiary object pairs (cake, knife), it can help the model to infer the correct action.

we study the disambiguating power of subsidiary scene relations via a double Graph Attention Network that aggregates visual-spatial, and semantic information in parallel. The network uses attention to leverage primary and subsidiary contextual cues to gain additional disambiguating power.

Visual-Semantic Graph Attention Network: After instance detection, a visual-spatial and a semantic graph are created. Node edge weights are dynamically through attention. We combine these graphs and then perform a readout step on box-pairs to infer all possible predicates between one subject and one object.
A graph
A graph with
DGL is a Python package dedicated to deep learning on graphs, built atop existing tensor DL frameworks (e.g. Pytorch, MXNet) and simplifying the implementation of graph-based neural networks.
In this project, we implement our method using the Pytorch and DGL library and there are three main folders:
datasets/: contains codes to prepare the train/test data;model/: contains codes to constructe the model;result/: contains codes to evalute the model on HICO-DET and save the evaluation results;
In the following, we briefly introduce some main scripts.
hico_process.sh: the file that includes all comments to prepare for train/test data;hico_constants.pyandmetadata.py: configuration files;hico_mat_to_json.py: script to convert the original dataset*.matfiles to*.jsonfiles;hico_hoi_cls_count.py: script to count the training samples of each HOI category;hico_split_ids.py: script to split the dataset into train/valuation/test dataset;hico_run_faster_rcnn.py: script to run Faster R-CNN to save the object detection data;hico_select_confident_boxes.py: script to select the confident detection boxes exceed the thresholds;evaluate_instance_detection.py: script to evalute the detection results(You can skim this script);hico_train_val_test_data.py: script to prepare the train/val/test data by matching the object detection result with ground-truth data;hico_word2vec.py: script to prepare the word embedding features;hico_spatial_feature.py: script to prepare the spatial features;
config.py: configuration file;model.py: script to construct the whole model which include two main part: graph networks and readout network;grnn.py: script to construct the graph networks;utils.py: script to consturct the MLPs;
hico_eval.sh: the file that includes all comments to get the evaluation result;compute_map.py: script to calculate the map for each HOI category based on the HOI detection results;sample_analysis.py: script to calculate the mAP for Full, Rare, Non-Rare;
hico_train.py: script to train the model on train_set for hyperparameter selection;hico_trainval.py: script to train the model on trainval_set for final learned model;hico_eval.py: script to evalute the trained model on test_set;inference.py: script to output the HOI detection results in specified images;utils/vis_tool.py: script to visualize the detection results;
- Python 3.6
- Pytorch 1.1.0
- DGL 0.3
- CUDA 10.0
- Ubuntu 16.04
-
Clone this repository.
git clone https://github.com/BIGJUN777/VS-GATs.git -
Install Python dependencies:
pip install -r requirements.txt
- Download the original HICO-DET dataset and put it into
datasets/hico. - Follow here to prepare the original data of V-COCO dataset in
datasets/vcocofolder. - Download the pretrain word2vec model on GoogleNews and put it into
datasets/word2vec
-
You can directly download our processed data from HICO-DET (password: 3rax) and V-COCO (password: bfad) and extract them with the original file name into
datasets/processed. -
If you want to finish it by yourself, you first need to copy
utils/generalized_rcnn.pyandroi_heads.pythese two files to the folder including the implemented Faster R-CNN(e.g.~/anaconda3/envs/py3_test/lib/python3.6/site-packages/torchvision/models/detection/) because we slightly modify the related code to save the desired visual features(We recommend you to backup the origial code first). And you can run the following commend:bash datasets/hico_process.sh bash datasets/vcoco_process.sh
-
Choose script
hico_train.pyorhico_trainval.pyto train the model for different requirements (described above). There are several options we can set when training the model. See thehico_train.pyfor more details.python hico_train.py/hico_trainval.py --e_v='vs_gats_train' --t_m='epoch' --b_s=32 --f_t='fc7' --layers=1 --lr=0.00001 --drop_prob=0.3 --bias='true' --optim='adam' --bn=False --m_a='false' --d_a='false' --diff_edge='false' -
Similarly, for V-COCO datset:
python vcoco_train.py/vcoco_trainval.py --e_v='vs_gats_train' --t_m='epoch' --b_s=32 --f_t='fc7' --layers=1 --lr=0.00001 --drop_prob=0.5 --bias='true' --optim='adam' --bn=False --m_a='false' --d_a='false' --diff_edge='false' -
You can visualized the training process through tensorboard:
tensorboard --logdir='log/'. -
Checkpoints will be saved in
checkpoints/folder.
-
Run the following script: option 'final_ver' means the name of which experiment and 'path_to_the_checkpoint_file' means where the checkpoint file is. (You can use the checkpoint of HICO-DET (password: 453k) and V-COCO (password: 8r6g) to reproduce the detection results in our paper.).
bash hico_eval.sh 'final_ver' 'path_to_the_checkpoint_file' -
For V-COCO dataset, you first need to cover the original
./datasets/vcoco/vsrl_eval.pywith the new one in./result/vsrl_eval.pybecause we add some codes to save the detection results. Then run:python vcoco_eval.py -p='path_to_the_checkpoint_file' -
Results will be saved in
result/folder.
- Please check the paper for the quantitative results and several qualitative detection results are as follow:


In this project, some codes which process the data and eval the model are built upon ECCV2018-Learning Human-Object Interactions by Graph Parsing Neural Networks and ICCV2019-No-Frills Human-Object Interaction Detection: Factorization, Layout Encodings, and Training Techniques. Thanks them for their great works.