WeChangeTech USB/Uart IMU module ROS package


-
udev (do only once)
roscd sensor_imu/script/ sudo ./udev.sh
-
build
catkin_make
-
run
# with `gravity:=false` can output none gravity imu data # (z,y,z line accel is zero when static or constant speed) roslaunch sensor_imu sensor_imu.launch [gravity:=false]
-
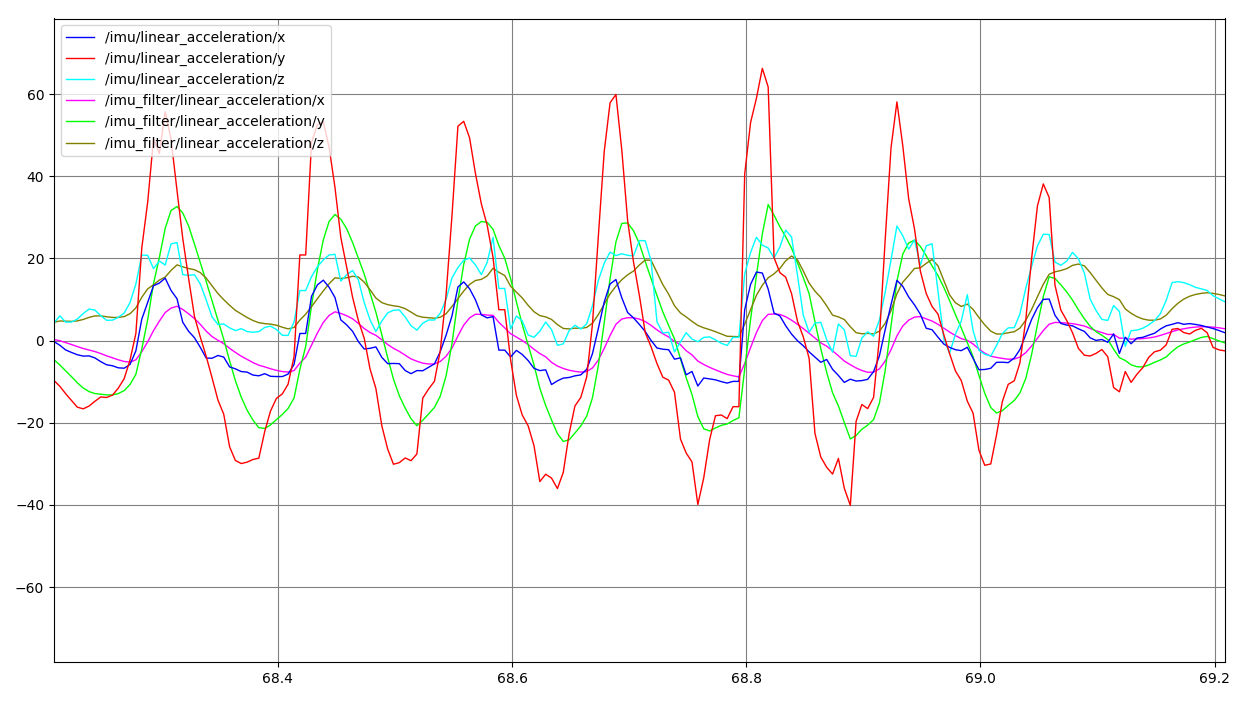
plot
rqt_plot /imu/linear_acceleration /imu_filter/linear_acceleration