Constrained robust optimal control library for robotics.
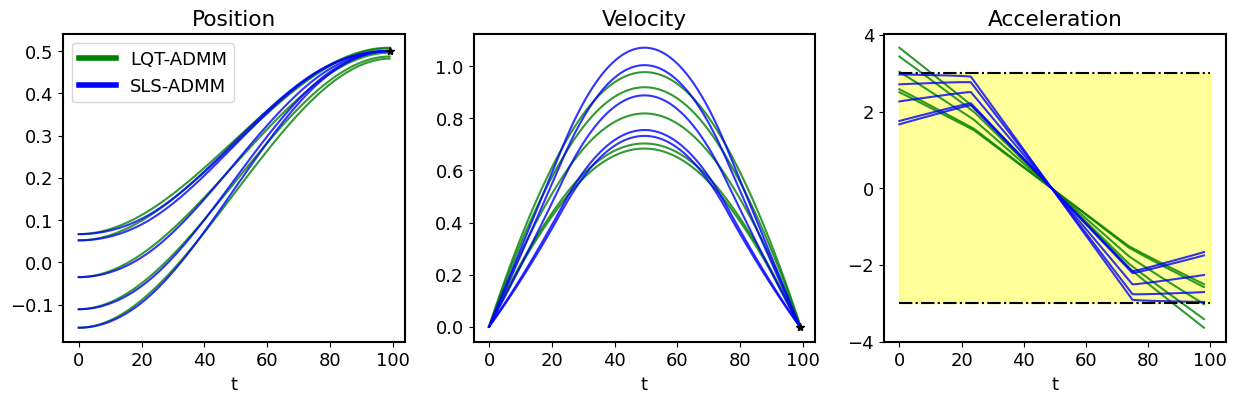
Robust (SLS-ADMM) and non-robust (LQT-ADMM) optimal control with state and control constraints for a double integrator system
- SLS-ADMM can guarantee robustness to an initial position change within a given variance,
with a chosen safety probability, while LQT-ADMM only satisfies the constraints along the nominal solution.

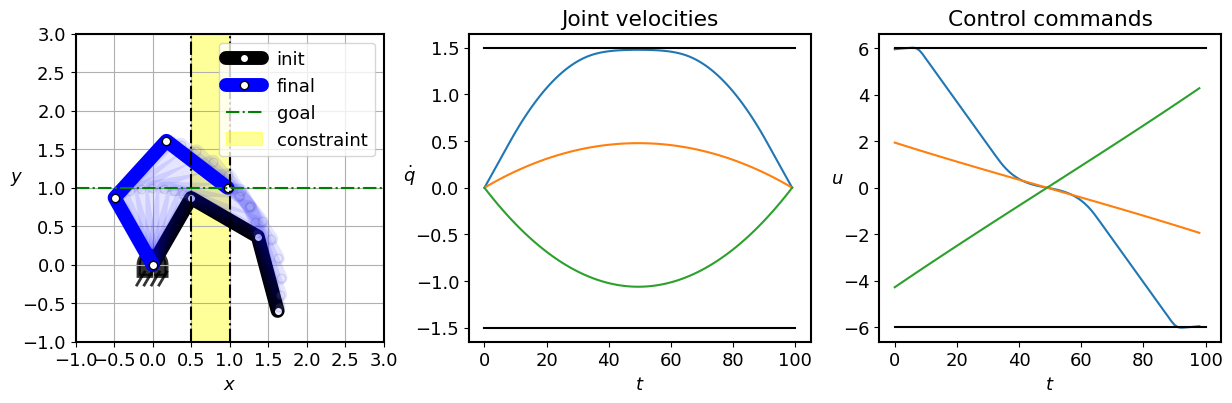
iLQR-ADMM with state and control bounds for a 3DoF planar robot arm.
- Fast optimization for nonlinear systems

iLQR with control bounds for a 2D car model.
- Fast optimization for nonlinear systems


Guideline:
isls = iSLS(x_dim, u_dim, N)
if nonlinear dynamics:
f(x_{t}, u_{t}): returns x_{t+1} forward dynamics function
isls.forward_model = f
get_AB(x,u): returns A,B
else:
isls.AB = A,B
if nonquadratic cost:
isls.cost_function = cost
get_Cs()
else:
isls.set_cost_variables()
isls.solve_ilqr()
Dependencies:
- numpy
- scipy
- matplotlib
- pinocchio