
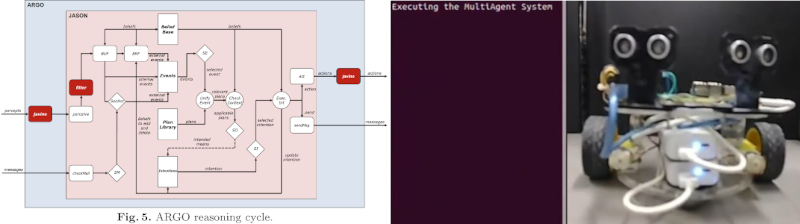
ARGO is a customized Jason agent architecture, capable of sensing and acting directly in the exogenous environment (physical world) over the Javino serial communication protocol.
-
How to use the ARGO in a Jason project: Argo Library for Jason
-
How to use the ARGO in a JaCaMo project: Argo Package for JaCaMo
-
For more information: See the ARGO Wiki.
Argo is licensed under a Creative Commons Attribution 4.0 International License. The licensor cannot revoke these freedoms as long as you follow the license terms:

- Attribution — You must give appropriate credit like below:
Pantoja, C.E., Stabile, M.F., Lazarin, N.M., Sichman, J.S. (2016). ARGO: An Extended Jason Architecture that Facilitates Embedded Robotic Agents Programming. In: Baldoni, M., Müller, J., Nunes, I., Zalila-Wenkstern, R. (eds) Engineering Multi-Agent Systems. EMAS 2016. Lecture Notes in Computer Science(), vol 10093. Springer, Cham. https://doi.org/10.1007/978-3-319-50983-9_8
Bibtex Citation
@InProceedings{ArgoAgent,
doi="10.1007/978-3-319-50983-9_8"
author="Pantoja, Carlos Eduardo and Stabile, M{\'a}rcio Fernando and Lazarin, Nilson Mori and Sichman, Jaime Sim{\~a}o",
editor="Baldoni, Matteo and M{\"u}ller, J{\"o}rg P. and Nunes, Ingrid and Zalila-Wenkstern, Rym",
title="{ARGO: An Extended Jason Architecture that Facilitates Embedded Robotic Agents Programming}",
booktitle="Engineering Multi-Agent Systems",
year="2016",
publisher="Springer International Publishing",
address="Cham",
pages="136--155",
isbn="978-3-319-50983-9"
}