The software was developed on the following dependencies. Ubuntu 20.04 and ROS Noetic is a must for compiling SLICT due to UFOMap's minimum requirement. However a docker can be used to run SLICT with older OS versions. Please find the instructions below.
-
Ubuntu 20.04 with ROS Noetic
-
Ceres 2.1.0 (or older, if you use later versions you may encounter this error)
git clone https://ceres-solver.googlesource.com/ceres-solver cd ceres-solver && git fetch --all --tags git checkout tags/2.1.0 mkdir build && cd build cmake .. && make -j$(nproc) sudo make install
-
One more package:
sudo apt install ros-$ROS_DISTRO-tf2-sensor-msgs
SLICT uses UFOMap for global map management. It also supports epicyclic lidar (Livox). Thus, three packages need to be included in the catkin workspace:
Please install all dependencies first. Afterwards, create a ros workspace, clone the packages to the workspace, and build by catkin build or catkin_make, for e.g.:
mkdir -p slict_ws/src
cd slict_ws/src
git clone https://github.com/brytsknguyen/slict
git clone https://github.com/brytsknguyen/ufomap && cd ufomap && git checkout devel_surfel && cd ..
git clone https://github.com/brytsknguyen/livox_ros_driver
cd .. && catkin build
The launch files for NTU VIRAL, Newer College, MCD VIRAL, and FusionPortable are provided under launch
Please raise an issue if you encounter any problem.
After build step success, run following commands:
source devel/setup.zsh # Or make this command automatic by: echo "source /home/$USER/slict_ws/devel/setup.bash" >> ~/.bashrc"
roslaunch slict run_ntuviral.launch bag_file:=${PATH_TO_THE_NTU_BAG}
# Example: roslaunch slict run_ntuviral.launch bag_file:=/home/$USER/DATASETS/ntu_viral/eee_01/eee_01.bag

To use SLICT on any platform without compiling issues, we prepare a docker image with all things precomiled.
First, please install docker engine using the instructions at https://docs.docker.com/engine/install .
Once done, pull this repo into your workspace, then build (ignore error), and source devel/setup.sh to update the path to packages. For e.g.
mkdir catkin_ws/src
cd catkin_ws/src
git clone https://github.com/brytsknguyen/slict
catkin build # there may be error
source ../devel/setup.bash # now SLICT's path is set
Now we can just call the scripts under docker for the corresponding dataset. For example you can run SLICT with an NTU VIRAL sequence by
roscd slict/docker && ./run_ntuviral.sh /path/to/dataset
You can also set a default /path/to/dataset in the script run_ntuviral.sh at this line.
To change between the sequence, simply change the bag_file argument in the launch file.
For advance users who wants to test your changes to SLICT on the local container, simply build one with the provided docker file:
roscd slict/docker && make build # Container is named slict-noetic-focal
Afterwards, you can remove the repository reference brytsknguyen in the script to use the local container slict-noetic-focal
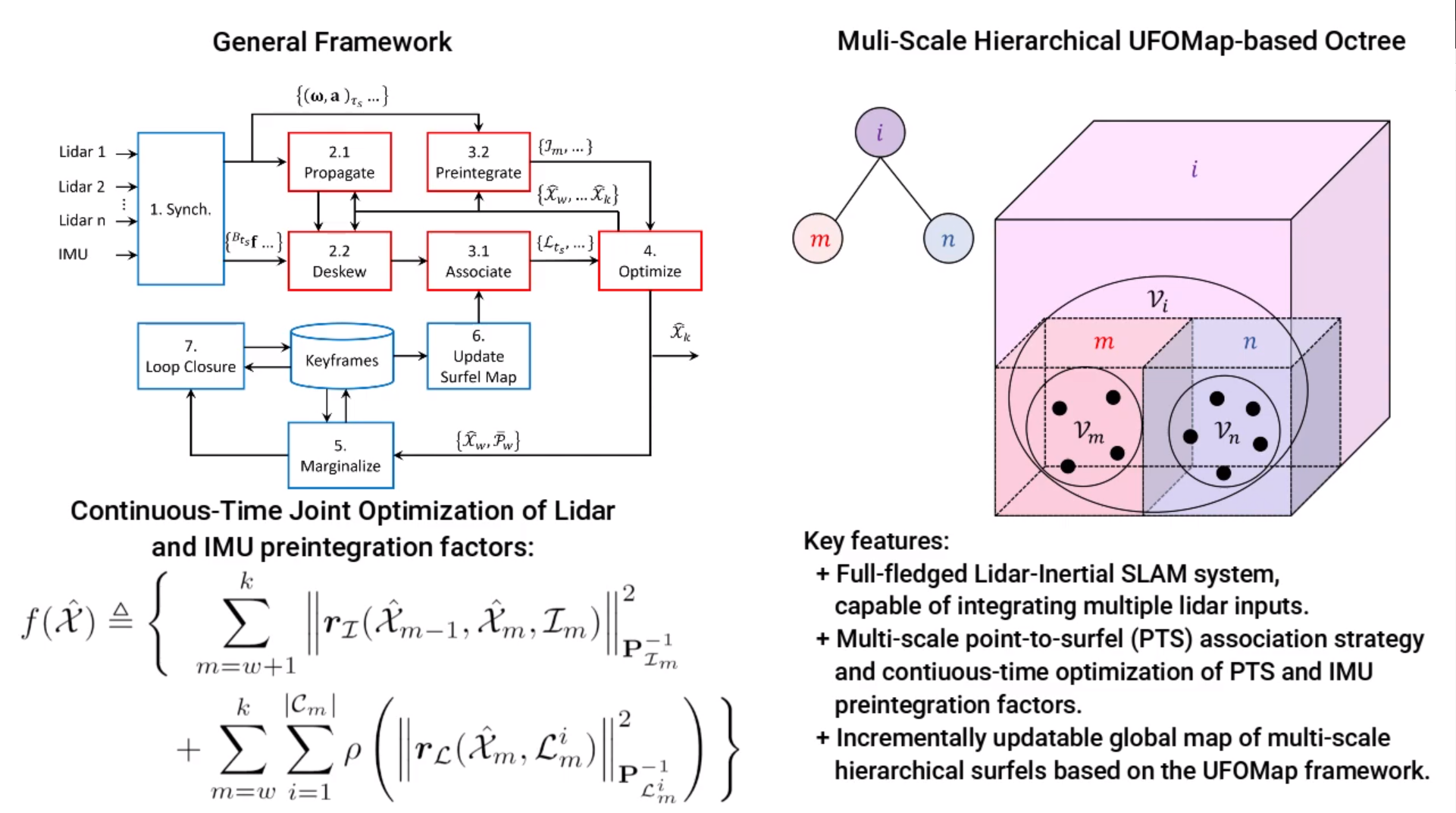
SLICT was developed with intention to keep things educational.The whole backbone of the program is in the following steps:

Parts of SLICT were used in the course "Optimization-Based Localization and Mapping" at Division of Robotics, Perception and Learning, KTH Royal Institute of Technology (http://kth-rpl.se/). The course is open to public at the following OBLAM Course Site.

The details of SLICT are presented in the paper (accepted, pending publication) and further elaborated in the attached slides slides. Please cite this work if you find it useful:
@article{nguyen2023slict,
title = {SLICT: Multi-input Multi-scale Surfel-Based Lidar-Inertial Continuous-Time Odometry and Mapping},
author = {Nguyen, Thien-Minh and Duberg, Daniel and Jensfelt, Patric and Yuan, Shenghai and Xie, Lihua},
journal = {IEEE Robotics and Automation Letters},
volume = { },
number = { },
pages = {0--8},
year = {2023}
publisher = {IEEE}
}
