Navigation with Husky robot only from RGB images. The ctu-vras/monoforce package is used as robot-terrain interaction and path planning pipeline.
Trajectories prediction is based on the NVIDIA/warp and ctu-vras/diffsim packages.


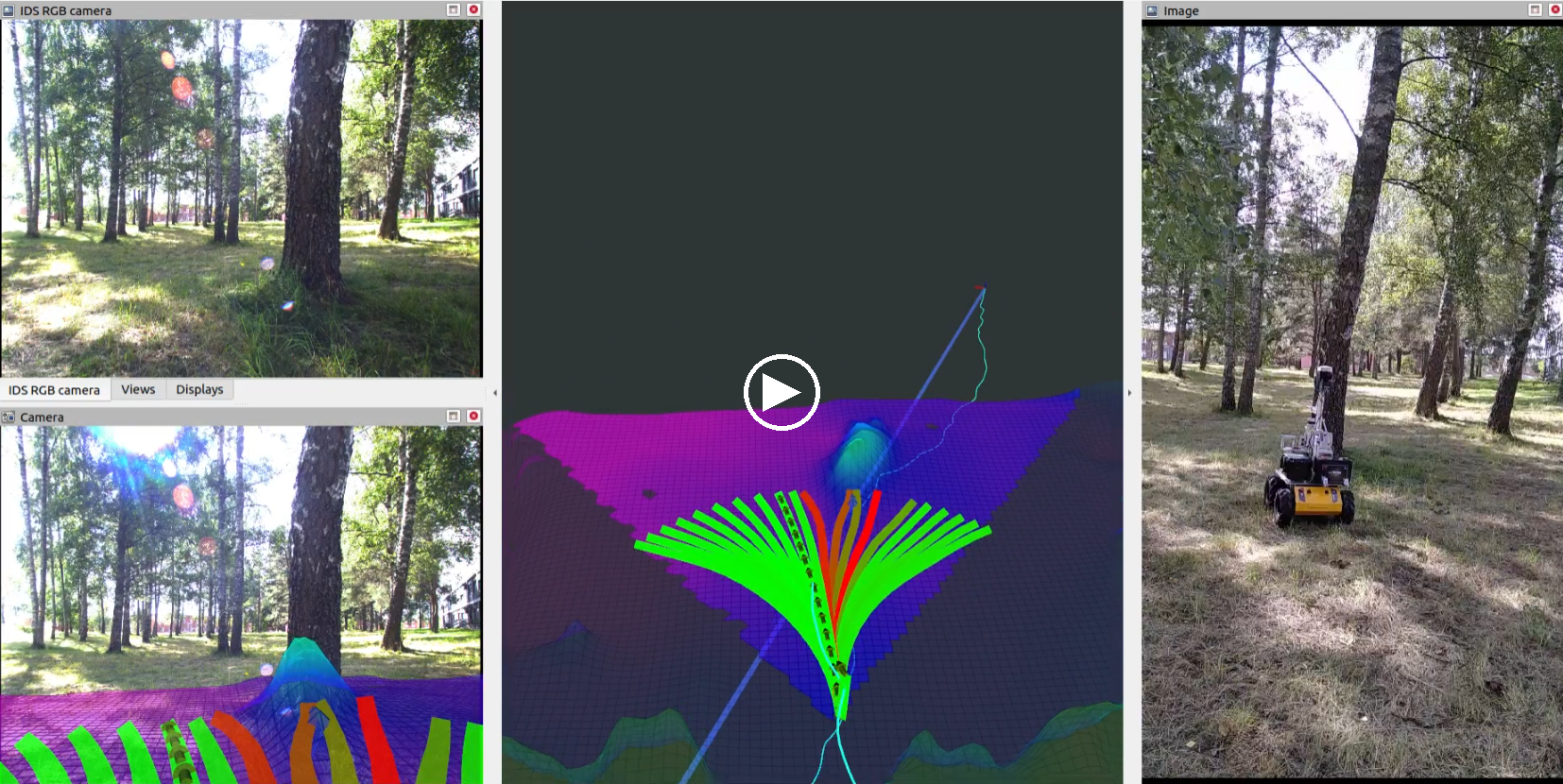
Navigation consists of the following stages:
- Image acquisition: RGB images are acquired from the Gazebo simulator.
- Height map prediction: The Terrain Encoder part of the MonoForce is used to estimate terrain properties.
- Trajectories prediction: The Diff Physics part of the MonoForce is used to shoot the robot trajectories.
- Trajectory selection: The trajectory with the smallest cost based on robot-terrain interaction forces is selected.
- Control: The robot is controlled to follow the selected trajectory.
Please, refer to INSTALL.md for installation instructions.
roslaunch husky_nav husky_monoforce.launch warp_dphys:=trueConsider citing the paper if you find the package relevant to your research:
@article{agishev2023monoforce,
title={MonoForce: Self-supervised Learning of Physics-aware Model for Predicting Robot-terrain Interaction},
author={Ruslan Agishev and Karel Zimmermann and Vladimír Kubelka and Martin Pecka and Tomáš Svoboda},
year={2023},
eprint={2309.09007},
archivePrefix={arXiv},
primaryClass={cs.RO}
}