- 此工程为导航算法需要的基础知识。详细文档
- 此工程在孵化ROS2的四足机器人项目。
- 详细的视频讲解 哔哩哔哩 bilibili
|
|
|
|
|
|---|---|---|---|
|
|
|
|
|








|
|
|
|
|
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
















- RVIZ Path
- RVIZ Trajectory
- RVIZ Marker
|
|
|
|---|


- Gazebo Sensors
- Gazebo Differential Robot
|
|
|
|
|
|---|

- BT: Action
- BT: Control
- BT: Condition
- BT: Decorator
|
|
|
|
|
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
















- Gridmap: Iterators
- Gridmap: interpolation
- Gridmap: OpenCV
- Gridmap: ROS
- Gridmap: Filter
- Gridmap: RVIZ plugin
- Gridmap: map_visualization
- Gridmap: grid_map_costmap_2d
- slam_toolbox

- cartographer

-
ros2 navigation
-
costmap2d
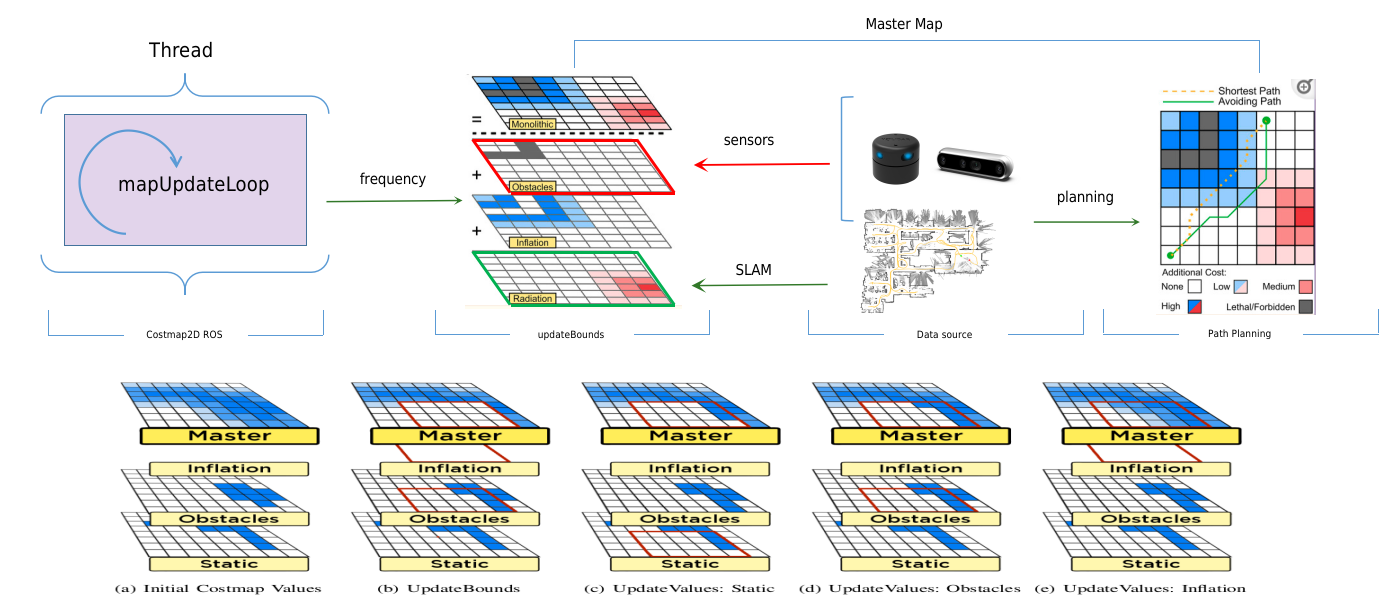
Costmap2D: Framework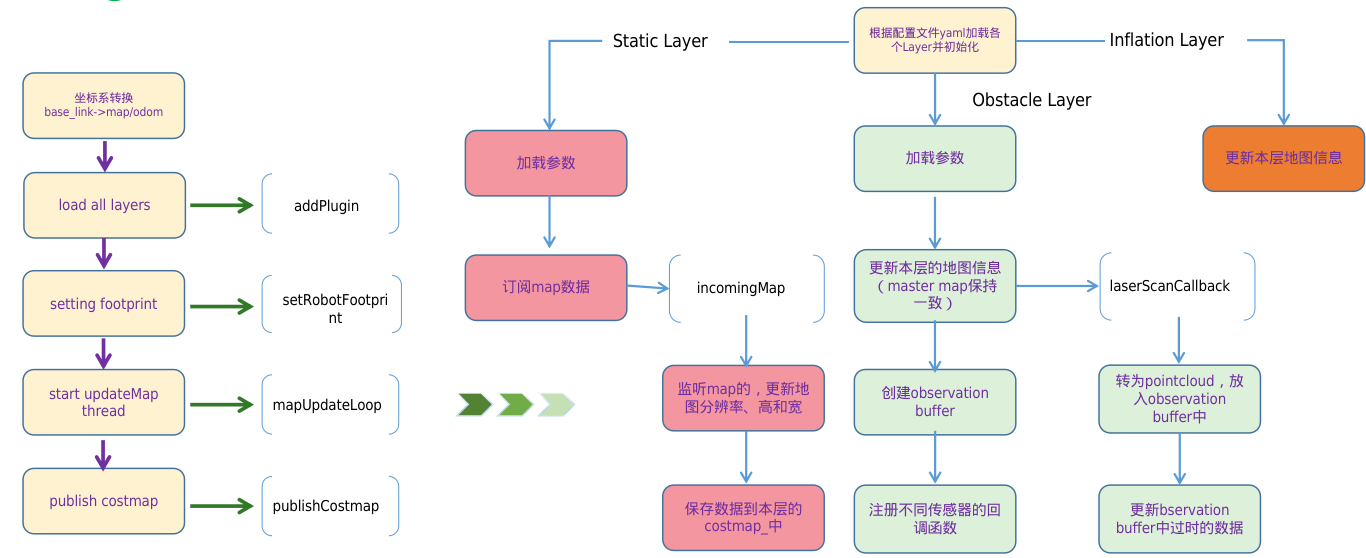
Costmap2D: Initialization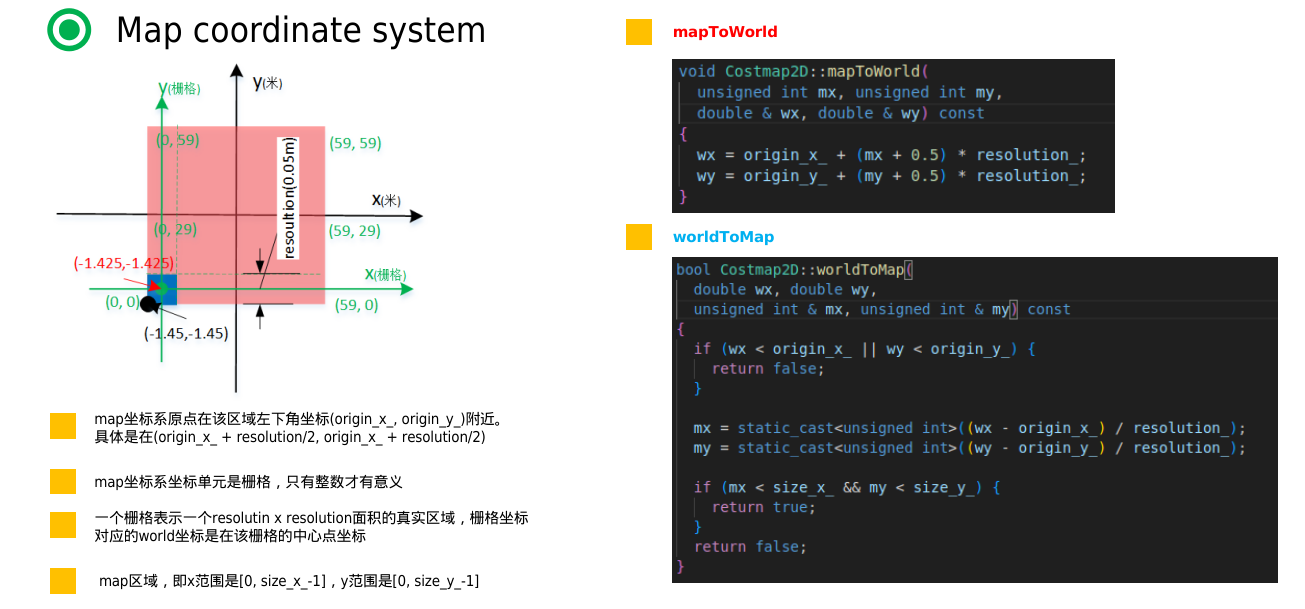
Costmap2D: Map Frame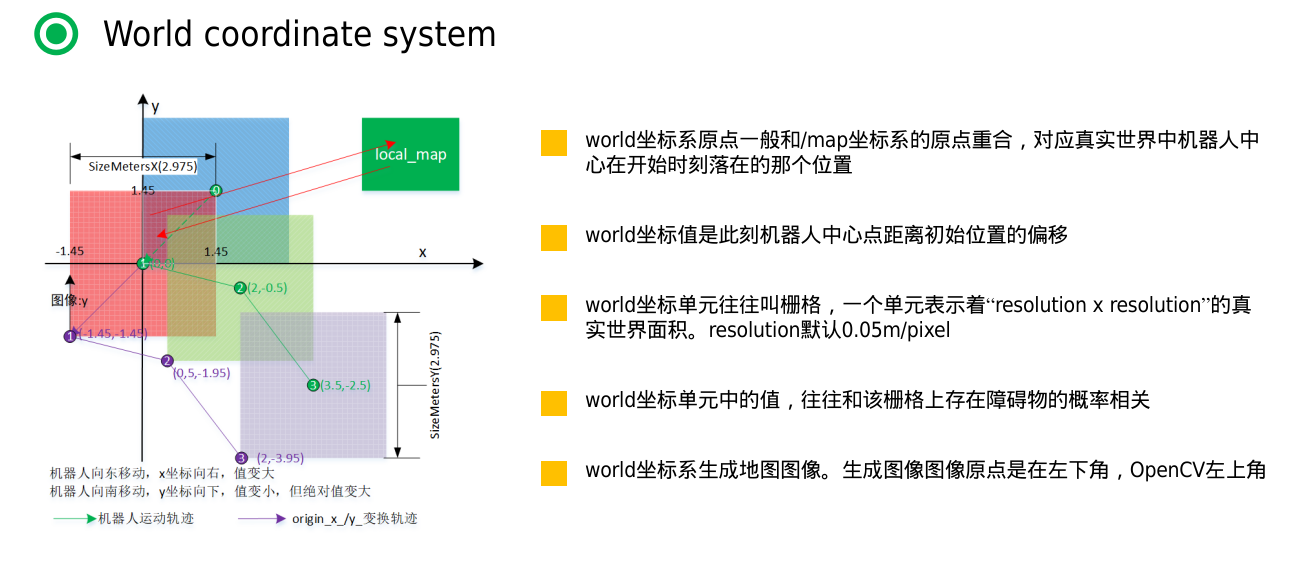
Costmap2D: World Frame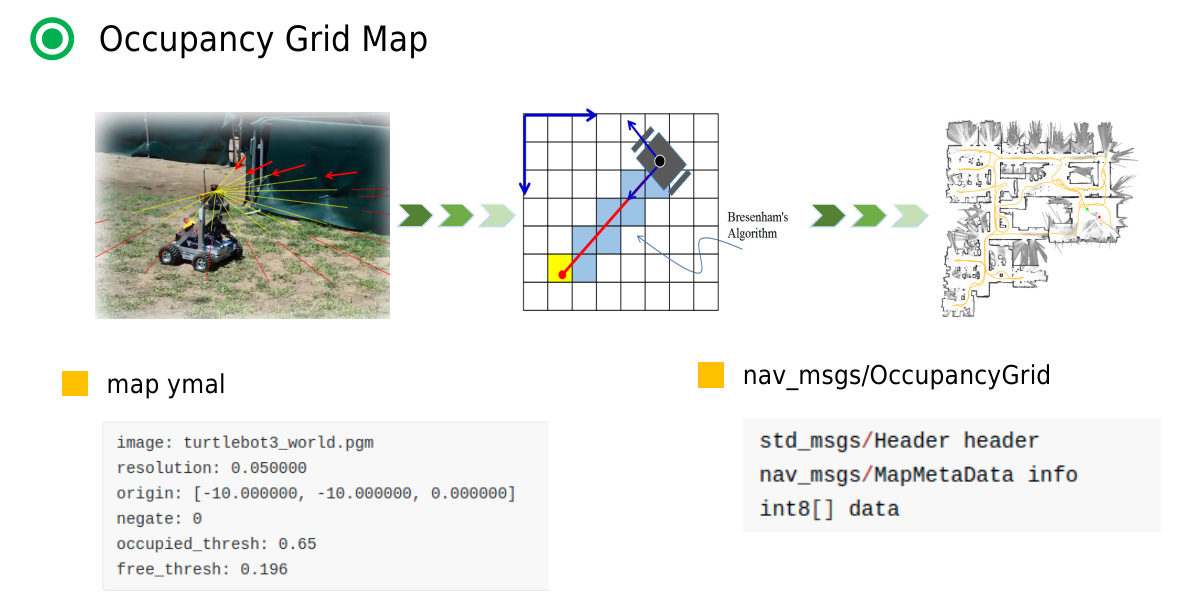
Costmap2D: Static Layer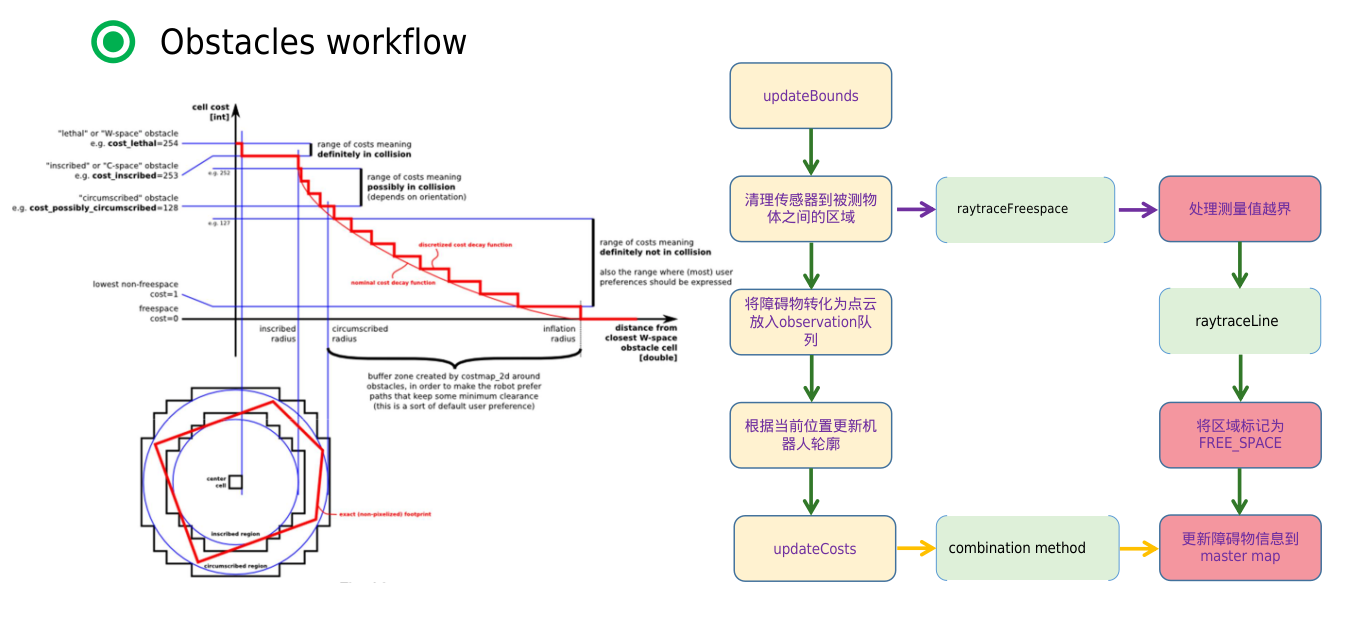
Costmap2D: Obstacle Layer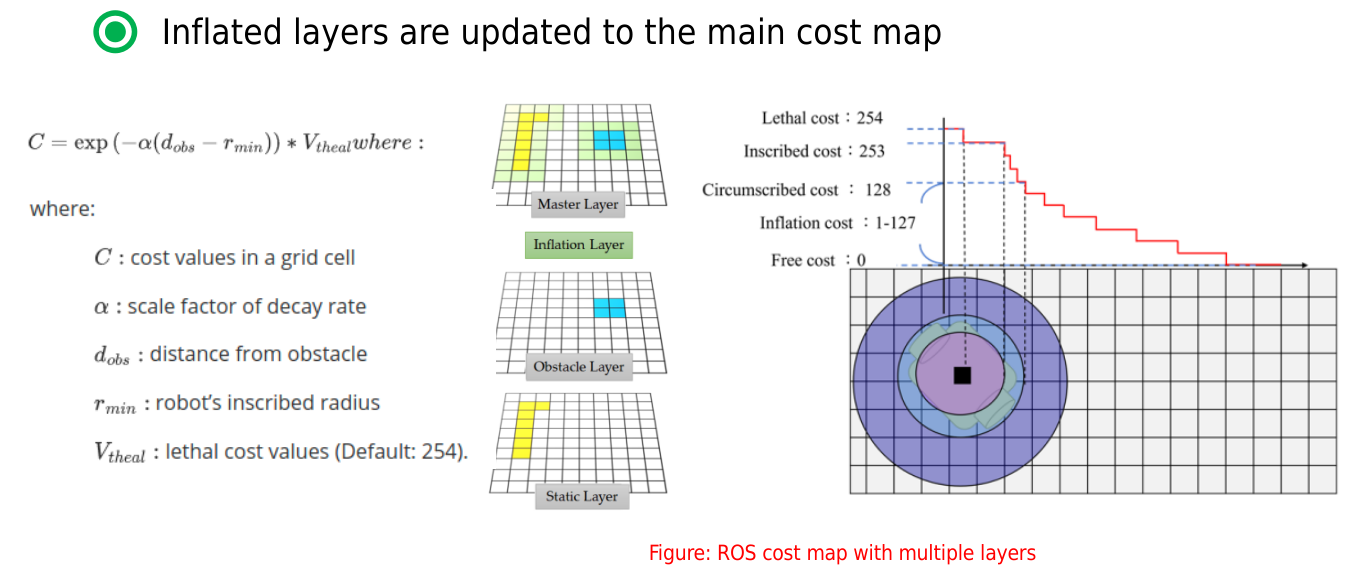
Costmap2D: Inflated Layer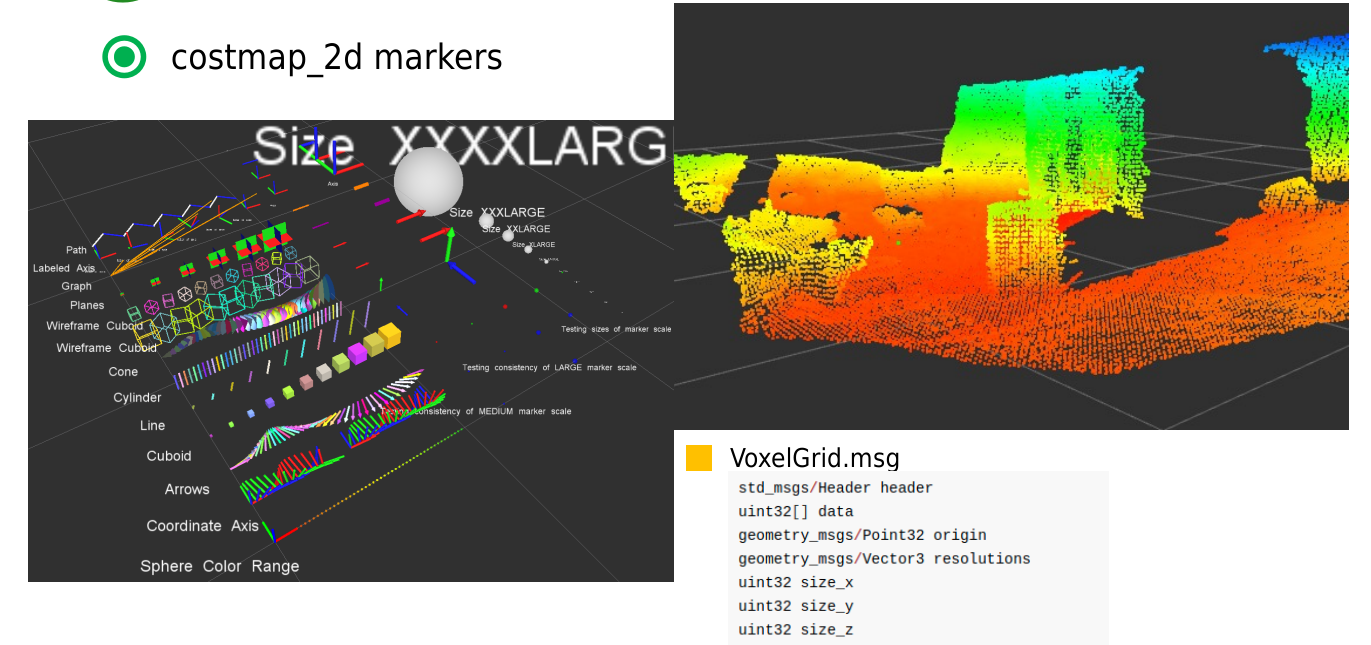
Costmap2D: Visualization Tool -
path planning
Dijkstra Path Planning Dijkstra 最短路径算法TODO 
A Path Planning* A*搜尋演算法TODO Hybrid A Path Planning* 混合A*搜尋演算法TODO Theta Path Planning* TODO dubins_path_planner TODO informed_rrt_star_planner TODO potential_field_planner TODO rrt_planner TODO voronoi_road_map_planner TODO breadth_first_search_planner TODO depth_first_search_planner TODO -
path tracking
DWA Controller
Pure pursuit Controller
Rotation shim controller
TEB Controller













|
|
|
|
|
|---|




- TerrainMap
- RRT Connect (Global path planner)
- Gazebo simulation
- NMPC
- Footsetp Planner

- 躬身入局挺膺负责,方有成事之可冀