: Guideline for CARLA simulation
담당자: Minho Oh, Euigon Epic Jung 유형: Notification for EE585 작성일시: 2021년 8월 30일 오후 4:18
- Contents
This part guides how to install CARLA and use it with ROS.
""Under installation guides are based on Ubuntu 18.04 in Local Desktop.""
"" I think NVIDIA Graph Drivier was pre-installed on each PC.""
Ref. Link: https://docs.docker.com/engine/install/ubuntu/
Summary for docker installation
# Uninstall old version if you need
sudo apt-get remove docker docker-engine docker.io containerd runc
# Set up the repository
# Update the apt package index and install packages to allow apt to use a repository over HTTPS:
sudo apt-get update
sudo apt-get install \
apt-transport-https \
ca-certificates \
curl \
gnupg \
lsb-release
# Add Docker’s official GPG key:
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /usr/share/keyrings/docker-archive-keyring.gpg
# Use the following command to set up the stable repository.
echo \
"deb [arch=amd64 signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/ubuntu \
$(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
# Install Docker Engine
# 1. Update the apt package index, and install the latest version of Docker Engine and containerd:
sudo apt-get update
sudo apt-get install docker-ce docker-ce-cli containerd.io
# 2. Verify that Docker Engine is installed correctly by running the hello-world image.
sudo docker run hello-worldRef. Link: https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/install-guide.html#docker https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/user-guide.html https://nodoudt.tistory.com/50
Summary for docker installation
# Set Repository
curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | \
sudo apt-key add -
distribution=$(. /etc/os-release;echo $ID$VERSION_ID)
curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | \
sudo tee /etc/apt/sources.list.d/nvidia-docker.list
sudo apt-get update
# Set Repository Key
curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | \
sudo apt-key add -
# Uninstall the nvidia-docker 1.0
sudo docker volume ls -q -f driver=nvidia-docker | xargs -r -I{} -n1 docker ps -q -a -f volume={} | xargs -r docker rm -f
sudo apt-get purge nvidia-docker
# Install nvidia-docker 2.0
sudo apt-get install nvidia-docker2
sudo pkill -SIGHUP dockerd-
Get the docker file for carla-ros-bridge by the following command.
git clone https://gitlab.com/Minho5/carla_ros_bridge
-
Please download the "CARLA_0.9.10.1.tar.gz" and "AdditionalMaps_0.9.10.1.tar.gz" from https://github.com/carla-simulator/carla/releases/tag/0.9.10.1. And, please put CARLA simulator in the same directory as the Dockerfile as following example.
~/carla_ros_bridge |- AdditionalMaps_0.9.10.1.tar.gz |- CARLA_0.9.10.1.tar.gz |- Dockerfile.melodic |- launch_container.sh |- LICENSE |- README.md
-
Build Docker image by following command
sudo docker build -t carla:0.9.10 -f Dockerfile.melodic .
-
Create Docker Container and Launch the docker by following command.
sudo ./launch_container.sh
If the execution is successful, you will see the following figure.

*** If you get the error message such as "time out(?) like following example, just ignore it.

- Obtain sensor data (lidar, semnatic lidar, cameras, GNSS, Radar, IMU) via ROS topics
- Obtain object data (Transforms, traffic light status, collision, lane invasion) via ROS topics
- Control autonomous agents (Steer/Throttle/Brake) by publishing the value via ROS topics or via RVIZ
- Control CARLA simulation by playing and pausing and setting simulation parameters
**# Terminal 1.
# After "sudo ./launch_container.sh"**
cd CARLA_0.9.10.1
./CarlaUE4.sh: Turn on the carla_ros_bridge node by opening "bridge.py"
**# Terminal 2.**
**# After "sudo ./launch_container.sh"**
**# "roslaunch" include running the ROS CORE
# Option 1: run only carla_ros_bridge
roslaunch carla_ros_bridge carla_ros_bridge.launch**
**# Option 2: run bridge with rviz, which is visualizator of ROS**
# = **carla_ros_bridge with all arg true + rviz**
**roslaunch carla_ros_bridge carla_ros_bridge_with_rviz.launch**
**# Option 3: run bridge with a random vehicle with manual control**
# = **carla_ros_bridge**
# **+ carla_example_ego_vehicle.launch**
# **+ carla carla_manual_control.launch**
**roslaunch carla_ros_bridge carla_ros_bridge_with_example_ego_vehicle.launch
# Option 4: Demo for autonomous driving
# = carla_ros_bridge
# + carla_example_ego_vehicle
# + carla_waypoint_publisher
# + carla_ad_agent
# + carla_manual_control
roslaunch carla_ad_demo carla_ad_demo.launch
# Option 5: Demo for scenario running
# = carla_ros_bridge
# + carla_example_ego_vehicle
# + carla_spectator_camera
# + carla_waypoint_publisher
# + carla_ros_scenario_runner
# + carla_twist_to_control
roslaunch carla_ad_demo carla_ad_demo_with_scenario.launch**
- carla_ad_demo_with_rviz.launch launches carla_ad_demo.launch
- carla_ad_demo.launch runs carla_ad_agent.py
- In carla_ad_agent.py, BasicAgent is constructed in its constructor.
def __init__(self, role_name, target_speed, avoid_risk):
"""
Constructor
"""
self._route_assigned = False
self._global_plan = None
self._agent = None
self._target_speed = target_speed
rospy.on_shutdown(self.on_shutdown)
# wait for ego vehicle
vehicle_info = rospy.wait_for_message(
"/carla/{}/vehicle_info".format(role_name), CarlaEgoVehicleInfo)
self._route_subscriber = rospy.Subscriber(
"/carla/{}/waypoints".format(role_name), Path, self.path_updated)
self._target_speed_subscriber = rospy.Subscriber(
"/carla/{}/target_speed".format(role_name), Float64, self.target_speed_updated)
self.vehicle_control_publisher = rospy.Publisher(
"/carla/{}/vehicle_control_cmd".format(role_name), CarlaEgoVehicleControl, queue_size=1)
self._agent = BasicAgent(role_name, vehicle_info.id, # pylint: disable=no-member
avoid_risk)- The local planner is set to BasicAgent which is located at basic_agent.py.
- The globally planned path (given) is set to the local planner of the agent in the run_step() function.
- run_step() function is where a step operation is executed so please look at run_step() functions carefully in the scripts to better understand how the program works.
def run_step(self):
"""
Execute one step of navigation.
"""
control = CarlaEgoVehicleControl()
control.steer = 0.0
control.throttle = 0.0
control.brake = 0.0
control.hand_brake = False
if not self._agent:
rospy.loginfo("Waiting for ego vehicle...")
return control
if not self._route_assigned and self._global_plan:
rospy.loginfo("Assigning plan...")
self._agent._local_planner.set_global_plan( # pylint: disable=protected-access
self._global_plan.poses)
self._route_assigned = True
else:
control = self._agent.run_step(self._target_speed)
return control- The return value of the run_step() function in my_local_planner.py is "control" which is published as CarlaEgoVehicleControl.msg (catkin_ws/src/ros-bridge/carla_msgs/msg)
- By giving the target point to the vehicle controller, Carla uses its built-in PID controllers to obtain control value to follow that target point.
# target waypoint
target_route_point = self._waypoint_buffer[0]
# for us redlight-detection
self.target_waypoint = self.get_waypoint(target_route_point.position)
target_point = PointStamped()
target_point.header.frame_id = "map"
target_point.point.x = target_route_point.position.x
target_point.point.y = target_route_point.position.y
target_point.point.z = target_route_point.position.z
self._target_point_publisher.publish(target_point)
# move using PID controllers
control = self._vehicle_controller.run_step(
target_speed, self._current_speed, self._current_pose, target_route_point)
# purge the queue of obsolete waypoints
max_index = -1
sampling_radius = target_speed * 1 / 3.6 # 1 seconds horizon
min_distance = sampling_radius * self.MIN_DISTANCE_PERCENTAGE
for i, route_point in enumerate(self._waypoint_buffer):
if distance_vehicle(
route_point, self._current_pose.position) < min_distance:
max_index = i
if max_index >= 0:
for i in range(max_index + 1):
self._waypoint_buffer.popleft()
return controlImplement the Local Planning and reach the goal through a given scenario.

An example video for local planner

The start and goal of the given task
-
Modify *my_local_planner.py *****to reach the goal safely
- my_local_planner.py ****is in catkin_ws/src/ros-bridge/carla_ad_agent/src/
-
Your local planner should follow the globally planned path as much as possible
-
Scenarios:
- Dynamic and static vehicles will be spawned in the street. Their spawning locations will be identical each time you spawn them, but their destinations might change.
- FYI, to evaluate your program fairly, the npcs' spawning points and travelling routes will be identical during evaluation.
- You can ignore the traffic lights. The other npcs will not follow the traffic rules as well.
- You should not cross any solid line, both yellow and white. Invasion of solid lines will be counted.
- Dynamic and static vehicles will be spawned in the street. Their spawning locations will be identical each time you spawn them, but their destinations might change.
-
Things you could change:
- These are the features that are already programmed
- PID controller that follows the target point
- Obstacle (including actors) detection around the ego vehicle
- Global path planner
- You may use LiDAR to locate the road markings and other obstacles that cannot be obtained by locating the actors and create an occupancy grid map
- You can modify any of the above features to accomplish the given task.
- These are the features that are already programmed
-
How to run
# 1. Open world bash ~/CARLA_0.9.10.1/CarlaUE4.sh # 2. Spawn npcs rosrun carla_ad_demo spawn_npc.py # 3. Run your grogram rosrun carla_ad_demo carla_ad_demo_with_rviz.launch
- Progress [%]
- Arc-length distance from the start to the current pose divided by the total arc-length of the global path
- If goal is reached (0.0 km/h speed within 4.0 m from the goal for 2 seconds), this criterion will be marked as 100%.
- Scores
- Rank 1: 10 points
- Rank 2: 8 points
- Rank 3: 6 points
- Rank 4: 4 points
- Rank 5~: 2 points
- Goal reached
- Scores
- 10 points if reached and 0 points if otherwise
- Scores
- Run time [sec]
- 5 minutes max.
- Timer stops when the goal is reached
- Scores
- Rank 1: 10 points
- Rank 2: 8 points
- Rank 3: 6 points
- Rank 4: 4 points
- Rank 5~: 2 points
- Collision per meter
- The number of occasion when an ego vehicle collides with other actors or static obstacles per meter
- Note that this criterion will be included in the ranking only when progress is 100% or goal is reached.
- Scores
- Rank 1: 5 points
- Rank 2: 4 points
- Rank 3: 3 points
- Rank 4: 2 points
- Rank 5~: 1 points
- Invasion per meter [only when progress is 100%]
- The number of occasion when an ego vehicle invades not allowed lines per meter
- Note that this criterion will be included in the ranking only when progress is 100% or goal is reached.
- Scores
- Rank 1: 5 points
- Rank 2: 4 points
- Rank 3: 3 points
- Rank 4: 2 points
- Rank 5~: 1 points
- Extra credit
- Your own start-to-goal global path planning (+10 points)
- Your own controller (+10 points)
- Use sensors for detection (+10 points)
- Please explain what you've changed in readme.txt file for TA.
-
Simulation result for your own test
-
You can see the following text if you close the program (i.e. ctrl+C), reach the goal, or exceed 5 mins of time limit.
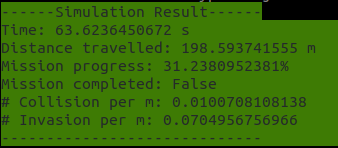
Example result
-
-
Warnings
- Do not modify evaluate.py to get the better results. We will use our own code to evaluate your program

Mount the open source for a state-of-the-art SLAM technology on the given platform in carla environment, and Improve it.
Platform - sensor Extrinsic / Intrinsic
sensor_noise(?)
Guideline for evo
Topics:
- Ground Truth: "/ee585/gt_odmetry"
- SLAM result odometry: "/ee585/slam_odometry"