API Reference : Reference/Tello SDK Documentation.pdf
Main.py
Main function of the application
Core parameters:
Threshold : The threshold that controls how many time a certain command should accumulate before send out to the drone
BUFFER_SIZE : Size of the buffers
Filter : You can design your own filters
power_line_frequency : target of the notch filter
ReceiveData.py
Now we receive the data from LSL protocol. But we might get it directly from the USB port through Cygnus_Kernel they build. However, the function is still under construction.
Kernel Reference: Reference/API_V0.10.8.pdf
Instruction for running the system
Install
pip install -r requirement.txt
Connect to the TELLO Wifi
Boot the drone
Find the wifi (as shown below), and connect to that one to order the drone
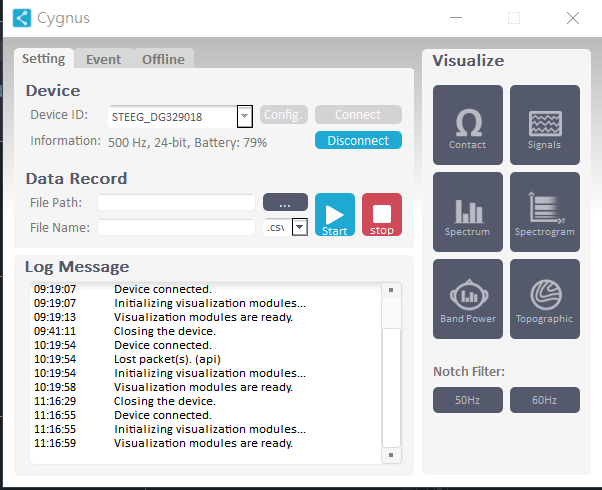
Open LSL data stream
Open Cygnus
Connect the device then data stream will be available
Open Blinking Window in one command window
python Blinking_window.py
Open another CMD window and start main program
python main.py
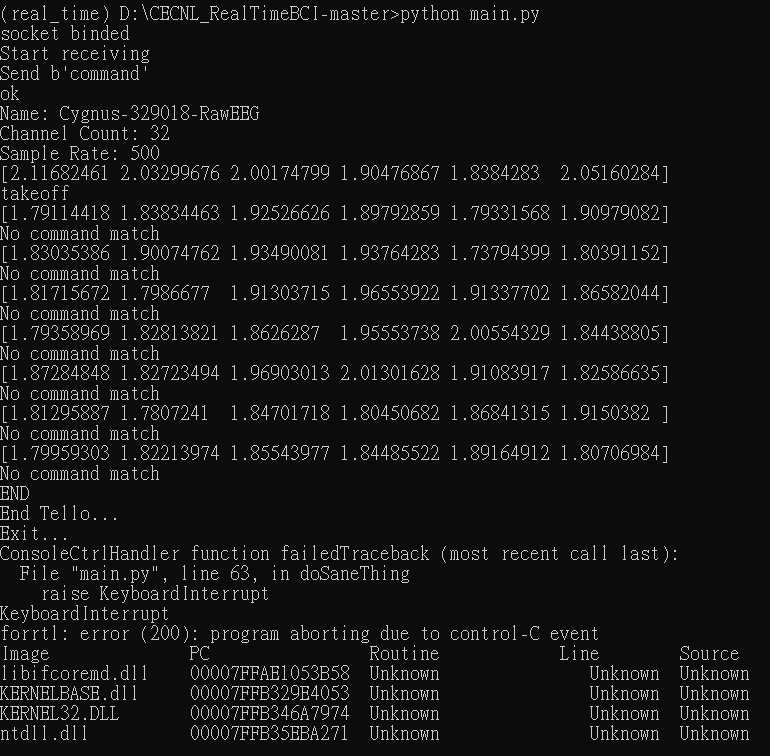
The snapshot of the execution of the program
CHECK!!!
The Wifi of the TELLO will close once there's no any command in around 15 seconds, so check which wifi currently connected
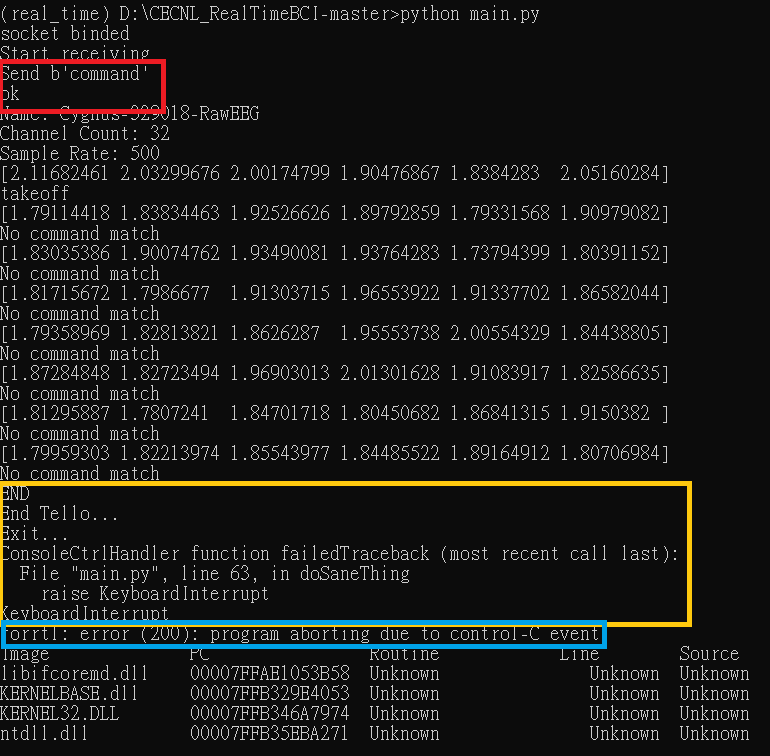
Make sure you receive ok as a response from the drone to ensure the drone is connected.
Ctrl+C to end the program and the drone will land
Ignore the error(200)
All shown as below:
Reference
Chen, Xiaogang, et al. "A high-itr ssvep-based bci speller." Brain-Computer Interfaces 1.3-4 (2014): 181-191.
Chen, Xiaogang, et al. "High-speed spelling with a noninvasive brain–computer interface." Proceedings of the national academy of sciences 112.44 (2015): E6058-E6067.
Nakanishi, Masaki, et al. "An approximation approach for rendering visual flickers in SSVEP-based BCI using monitor refresh rate." 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). IEEE, 2013.