

Question?

This C++ library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in you application.
BehaviorTree.CPP has many interesting features, when compared to other implementations:
- It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
- It allows the creation of trees at run-time, using a textual representation (XML).
- You can link staticaly you custom TreeNodes or convert them into plugins which are loaded at run-time.
- It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
https://behaviortree.github.io/BehaviorTree.CPP/
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface, check Groot out.

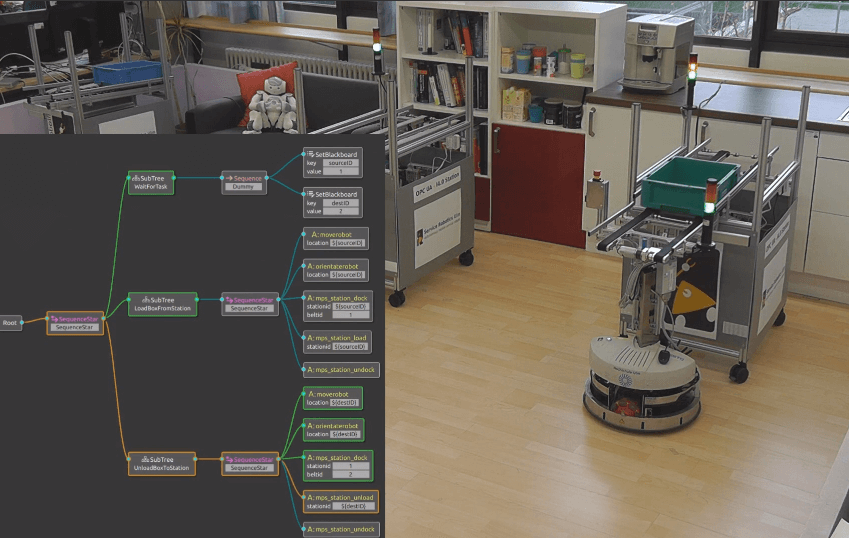
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
The only (optional, but recommended) dependency of BehaviorTree.CPP is ZeroMQ. On Ubuntu it can be easily installed with
sudo apt-get install libzmq3-dev
Any other dependency is already included in the 3rdparty folder.
You can easily install the package with the command
sudo apt-get install ros-$ROS_DISTRO-behaviortree-cpp
If you want to compile it with catkin, just include this package in your catkin warkspace as usual.
This library was developed at Eurecat (main author, Davide Faconti) in a joint effort with the Italian Institute of Technology (Michele Colledanchise).
It is one of the main components of MOOD2Be, which is one of the six Integrated Technical Projects (ITPs) selected from the RobMoSys first open call and it received funding from the European Union’s Horizon 2020 Research and Innovation Programme.
-
Introductory article: Behavior trees for AI: How they work
-
How Behavior Trees Modularize Hybrid Control Systems and Generalize Sequential Behavior Compositions, the Subsumption Architecture, and Decision Trees. Michele Colledanchise and Petter Ogren. IEEE Transaction on Robotics 2017.
-
Behavior Trees in Robotics and AI, published by CRC Press Taylor & Francis, available for purchase (ebook and hardcover) on the CRC Press Store or Amazon.
The Preprint version (free) is available here: https://arxiv.org/abs/1709.00084
The MIT License (MIT)
Copyright (c) 2014-2018 Michele Colledanchise Copyright (c) 2018 Davide Faconti
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.