ROS package for smoke detection and recognition with Turtlebot.
This package is not sufficient for performing the task.
- ROS kinetic
- darknet
- darknet_ros
- OpenCV (>=3.3.0)
- rbx1 (optional)
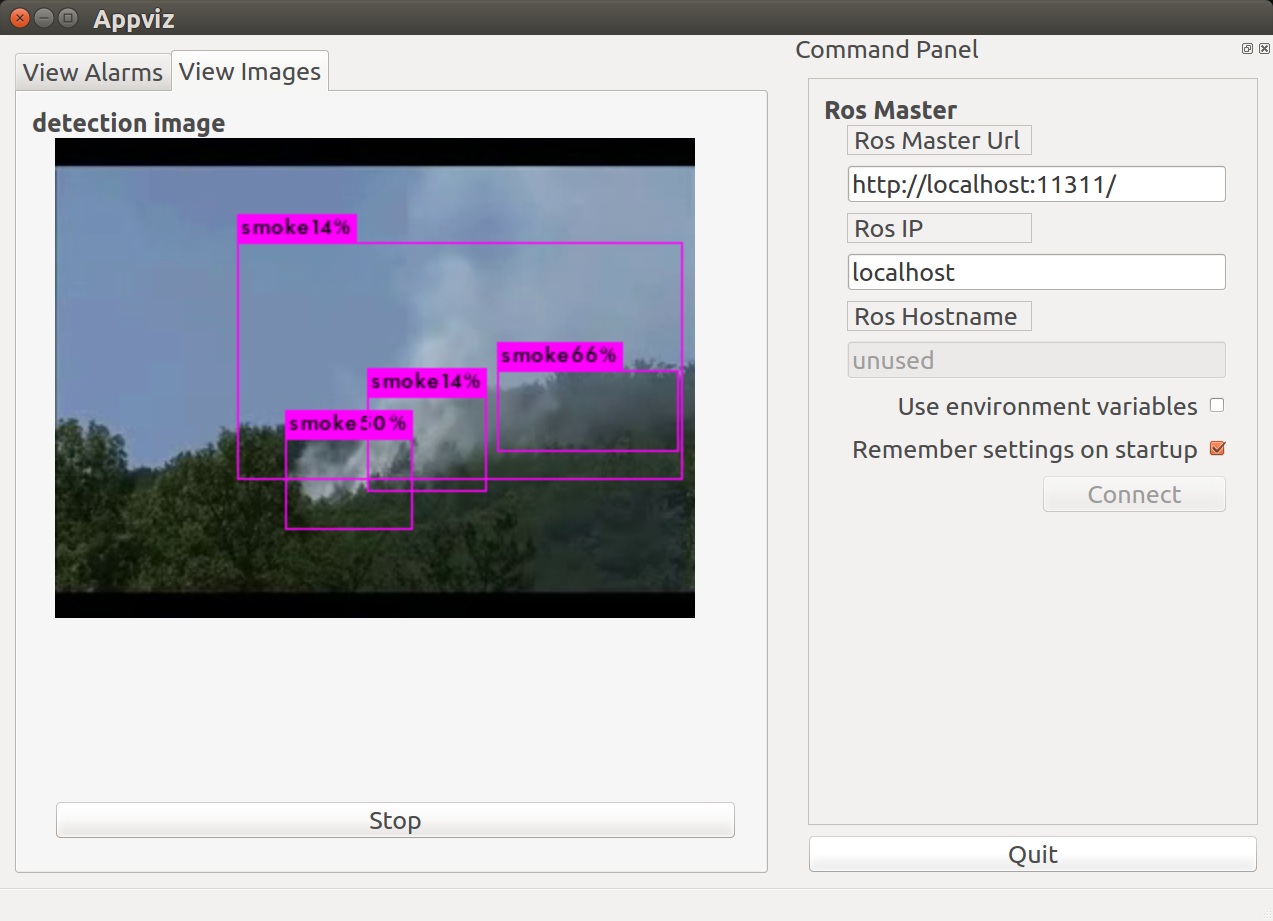
- Qt5 (optional)
-
Build libraries and executables (within an ROS workspace)
catkin_make -DCATKIN_WHITELIST_PACKAGES="smoke"If you have Qt5 installed, a gui would be built for simple visualization (as follows).
The build may not finish once. Please try again.
-
Run
- launch webcam using usb_cam.
- launch darknet_ros
roslaunch darknet_ros darknet_ros.launch - launch nodes of this package
- launch darknetDetector node
rosrun smoke darknet_svm_node
- launch svm server node
rosrun smoke svm_server
- launch kobuki alarm node
rosrun smoke kobuki_actSrv.py
- launch alarm node
rosrun smoke alarm_sub.py
- visualization
rosrun smoke appviz_node
- launch darknetDetector node

-
smoke.1.launchtest with real smoke and real robot
-
darknet_ros_smoke.launchlaunch darknet_ros
-
test_darknet.launchtest the object detection framework
-
test_act.launchtest the action server for robot pose inference
-
test_srv.launchtest the service '/kinectdev/smoke/smoke_svm'
You can modify the .launch file to specify which nodes to run. Also modify the config file.