
Official GitHub repository for Argoverse dataset
If you have any questions, feel free to open a GitHub issue describing the problem.
- Installation
- Usage
- Demo
- Baselines
- Contributing
- Disclaimer
- License
- Open-Source Libraries Using Argoverse
Requires Linux/MacOS, git, and Python 3.6+
- Clone this repo to your local machine using:
git clone https://github.com/argoai/argoverse-api.git
- Download
hd_maps.tar.gzfrom our website and extract into the root directory of the repo. Your directory structure should look something like this:
argodataset
└── argoverse
└── data_loading
└── evaluation
└── map_representation
└── utils
└── visualization
└── map_files
└── license
...
We provide both the full dataset and the sample version of the dataset for testing purposes. Head to our website to see the download option.
-
Argoverse-Tracking provides track annotations and undistorted, raw data from camera (@30hz) and lidar sensors (@10hz) as well as two stereo cameras (@5hz). We've released a total 113 scenes/logs, separated into 65 logs for training, 24 logs for validating, and 24 logs for testing. We've separated training data into smaller files to make it easier to download, but you should extract them all into one folder. We also provide sample data (1 log) in
tracking_sample.tar.gz. -
Argoverse-Forecasting contains 327790 sequences of interesting scenarios. Each sequence follows the trajectory of the main agent for 5 seconds, while keeping track of all other actors (e.g car, pedestrian). We've separated them into 208272 training sequences, 40127 validation sequences, and 79391 test sequences. We also provide sample data (5 sequences) in
forecasting_sample.tar.gz.
Note that you need to download HD map data (and extract them into project root folder) for the API to function properly. You can selectively download either Argoverse-Tracking or Argoverse-Forecasting or both, depending on what type of data you need. The data can be extracted to any location in your local machine.
-
argoversecan be installed as a python package usingpip install -e /path_to_root_directory_of_the_repo/ -
if you receive any error about
No matching distribution found for pyntcloud, upgrade your pip usingpip install --upgrade pipor pip install with--process-dependency-links
Make sure that you can run import argoverse in python, and you are good to go!
- Some visualizations may require
mayavi. See instructions on how to install Mayavi here.
-
The
track_labels_amodalfolders contains object-oriented labels (in contrast to per-frame labels inper_sweep_annotations_amodalfolders. Run following script to remaketrack_labels_amodalfolders and fix existing issues:python3 argoverse/utils/make_track_label_folders.py argoverse-tracking/train/ python3 argoverse/utils/make_track_label_folders.py argoverse-tracking/val/
The Argoverse API provides useful functionality to interact with the 3 main components of our dataset: the HD Map, the Argoverse Tracking Dataset and the Argoverse Forecasting Dataset.
from argoverse.map_representation.map_api import ArgoverseMap
from argoverse.data_loading.argoverse_tracking_loader import ArgoverseTrackingLoader
from argoverse.data_loading.argoverse_forecasting_loader import ArgoverseForecastingLoader
avm = ArgoverseMap()
argoverse_tracker_loader = ArgoverseTrackingLoader('argoverse-tracking/') #simply change to your local path of the data
argoverse_forecasting_loader = ArgoverseForecastingLoader('argoverse-forecasting/') #simply change to your local path of the dataAPI documentation is available here. We recommend you get started by working through the demo tutorials below.
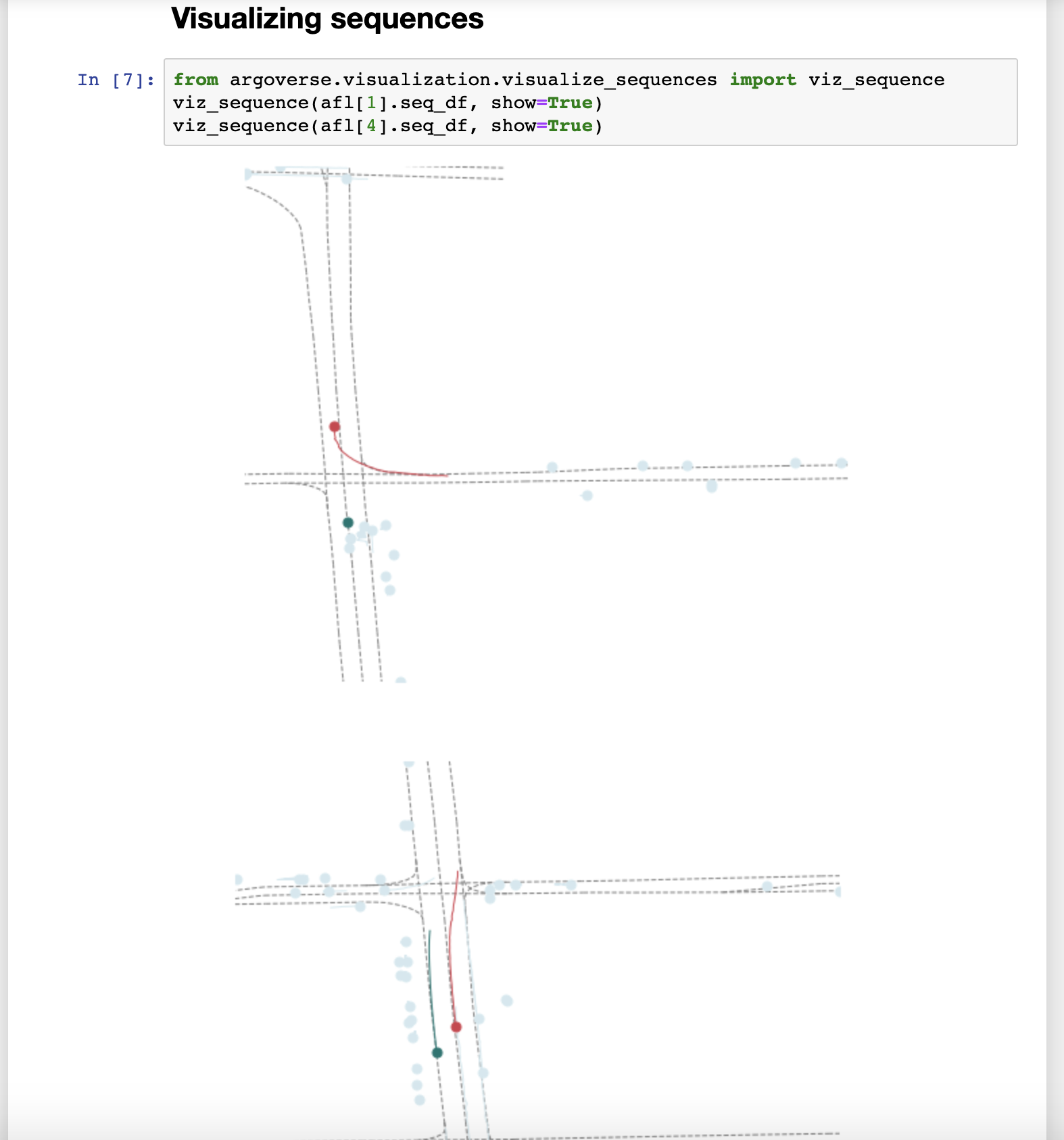
To make it easier to use our API, we provide demo tutorials in the form of Jupyter Notebooks.
To run them, you'll need to first install Jupyter Notebook pip install jupyter. Then navigate to the repo directory and open a server with jupyter notebook. When you run the command, it will open your browser automatically. If you lose the page, you can click on the link in your terminal to re-open the Jupyter notebook.
Once it's running, just navigate to the demo_usage folder and open any tutorial! Note that to use the tracking and forecasting tutorials, you'll need to download the tracking and forecasting sample data from our website and extract the folders into the root of the repo.
![]()
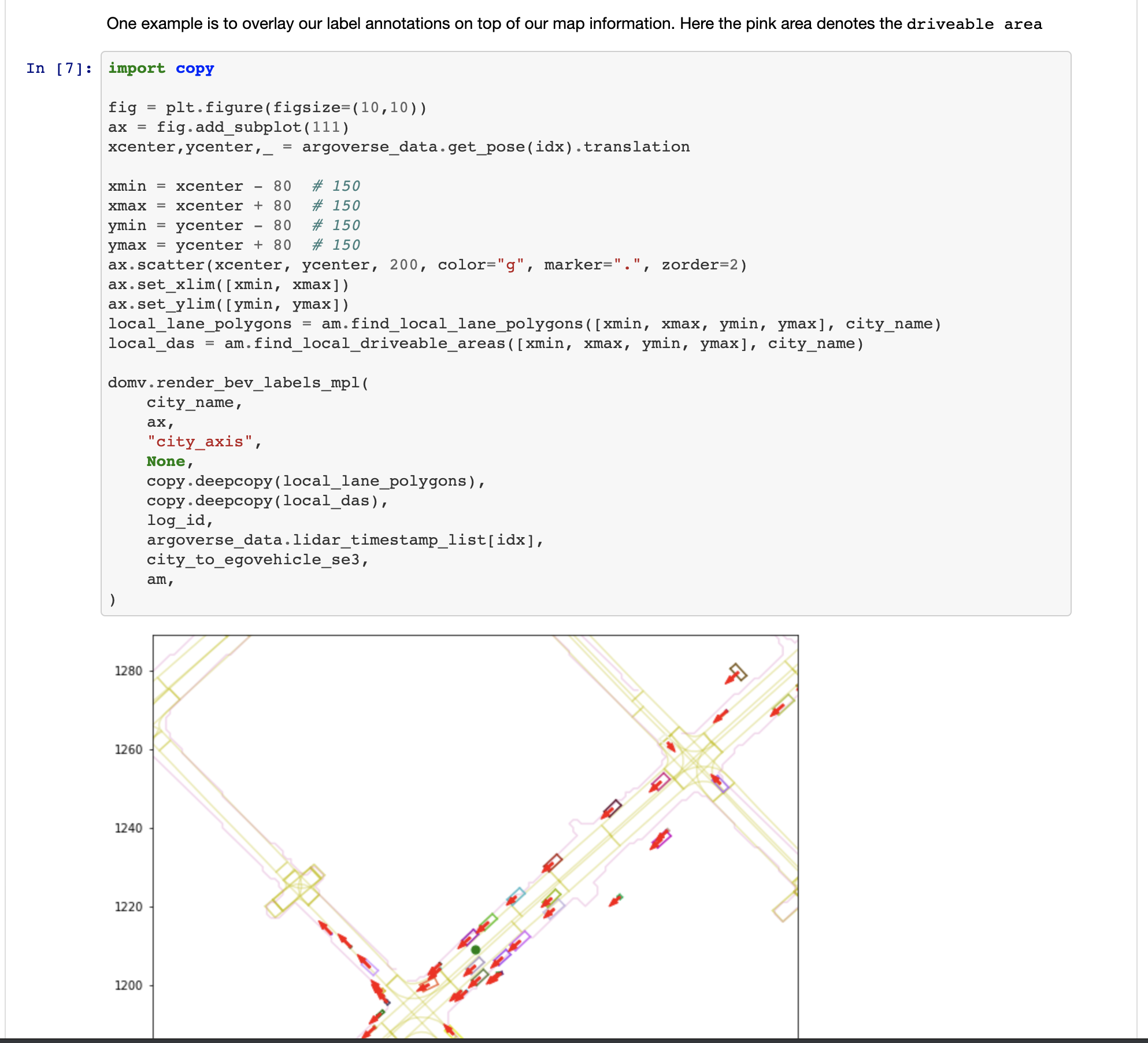
Run the following script to render cuboids from a birds-eye-view on the map.
$ python visualize_30hz_benchmark_data_on_map.py --dataset_dir <path/to/logs> --log_id <id of the specific log> --experiment_prefix <prefix of the output directory>
For example, the path to the logs might be argoverse-tracking/train4 and the log id might be 2bc6a872-9979-3493-82eb-fb55407473c9. This script will write to <experiment prefix>_per_log_viz/<log id> in the current working directory with images that look like the following: 
It will also generate a video visualization at <experiment prefix>_per_log_viz/<log id>_lidar_roi_nonground.mp4
Run the following script to render cuboids on images.
$ python cuboids_to_bboxes.py --dataset-dir <path/to/logs> --log-ids <id of specific log> --experiment-prefix <prefix for output directory>
This script can process multiple logs if desired. They can be passed as a comma separated list to --log-ids. Images will be written to <experiment prefix>_<log id> in the working directory that look like the following: 
It will also generate video visualizations for each camera in <experiment prefix>_amodal_labels/
Run the following script to render lidar points corresponding to the ground surface onto images.
$ python visualize_ground_lidar_points.py --dataset-dir <path/to/logs> --log-ids <comma separated list of logs> --experiment-prefix <prefix for output directory>
This will produce images and videos will be in the directory <experiment prefix>_ground_viz/<log id>. Here is an example image: 
For all log segments, accurate calibration between LiDAR and cameras enables sensor fusion approaches. In version 1.1 of Argoverse, we improved the stereo calibration significantly, as well.
We provide a number of SE(3) and SE(2) coordinate transforms in the raw Argoverse data. The main notation we use is:
p_dst = dst_SE3_src * p_src or p_dst = dst_SE2_src * p_src.
We'll describe the 6-dof transforms in more detail below:
- Map pose: represents the location and orientation of the ego-vehicle inside the city (i.e. map) reference frame,
city_SE3_egovehicle. We provide map pose for each log inposes/city_SE3_egovehicle_{nanosec_timestamp}.json. This transform brings a point in the egovehicle's reference frame into the city's reference frame. - Camera extrinsics: for each camera sensor, a variable named
egovehicle_SE3_cameracan be found in our log calibration filesvehicle_calibration_info.json. When we form the extrinsics matrix in our API, we use its inverse,camera_SE3_egovehicle, i.e. to bring points into the camera coordinate frame before perspective projection. - Object labels: an
egovehicle_SE3_objecttransformation is provided for each annotated cuboid, that takes points from the labeled object's reference frame (located at the object centroid), to the egovehicle's reference frame. This data is provided per LiDAR sweep atper_sweep_annotations_amodal/tracked_object_labels_{nanosec_timestamp}.json.
Note that for convenience, the LiDAR point cloud sweep data is provided directly in the ego-vehicle's coordinate frame, rather than in either of the LiDAR sensor frames. The ego-vehicle's reference frame is placed at the center of the rear axle (see Figure 3 of our paper, with "x" pointing forward, "z" pointing up, and "y" pointing to the left).
A simple example for understanding the object labels -- imagine the ego-vehicle is stopped at a 4-way intersection at a red light, and an object is going straight through the intersection with a green light, moving from left to right in front of us. If that labeled object is instantaneously 4 meters ahead of the egovehicle (+4 m along the x-axis), then the annotation would include the rotation to align the labeled object with the egovehicle's x-axis. Since we use the right-hand rule, we need a 90 degree rotation about the "z"-axis to align the object's x-axis with the egovehicle's x-axis. If (0,0,0) is the origin of the labeled object, to move itself into the egovehicle frame, you would need to add 4 to its x coordinate, thus adding the translation vector (4,0,0).
What about tracks in the forecasting dataset? These are provided directly in the city reference frame (i.e. the map coordinate system).
We have also released the baseline codes for both 3D tracking and motion forecasting tasks. 3D Tracking code can be found at https://github.com/alliecc/argoverse_baselinetracker and Motion Forecasting code at https://github.com/jagjeet-singh/argoverse-forecasting
Contributions are always welcome! Please be aware of our contribution guidelines for this project.
Argoverse APIs are created by John Lambert, Patsorn Sangkloy, Ming-Fang Chang, and Jagjeet Singh to support "Chang, M.F. et al. (2019) Argoverse: 3D Tracking and Forecasting with Rich Maps, paper presented at The IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (pp. 8748-8757). Long Beach, CA: Computer Vision Foundation." THIS SOFTWARE CODE IS INTENDED FOR RESEARCH PURPOSES ONLY AND IS NOT DESIGNATED FOR USE IN TRANSPORTATION OR FOR ANY OTHER DANGEROUS APPLICATION IN WHICH THE FAILURE OF SOFTWARE COULD CREATE A SITUATION WHERE PERSONAL INJURY OR DEATH MAY OCCUR.
We release our API under the MIT license. We retain the Apache 2.0 license on certain files. See LICENSE
- A nuScenes to Argoverse converter can be found at https://github.com/bhavya01/nuscenes_to_argoverse, contributed by Bhavya Bahl and John Lambert.
- A Waymo Open Dataset to Argoverse converter can be found at https://github.com/johnwlambert/waymo_to_argoverse, contributed by John Lambert and Hemanth Chittanuru.