Author: Hang Cui (hangcui3@illinois.edu)

$ cd ~/demo_ws/
$ catkin_make
$ source devel/setup.bash
$ roslaunch basic_launch sensor_init.launch
$ source devel/setup.bash
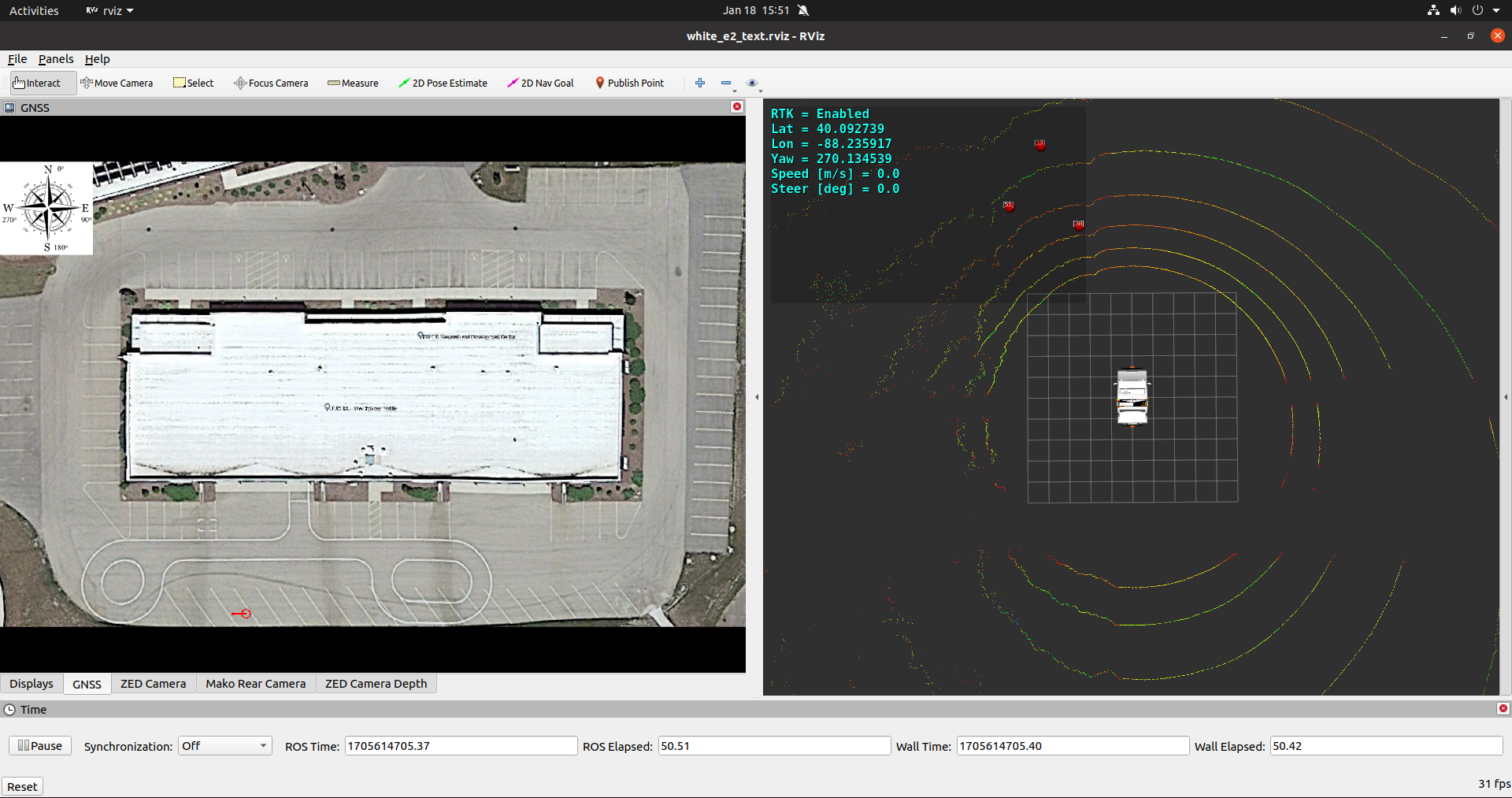
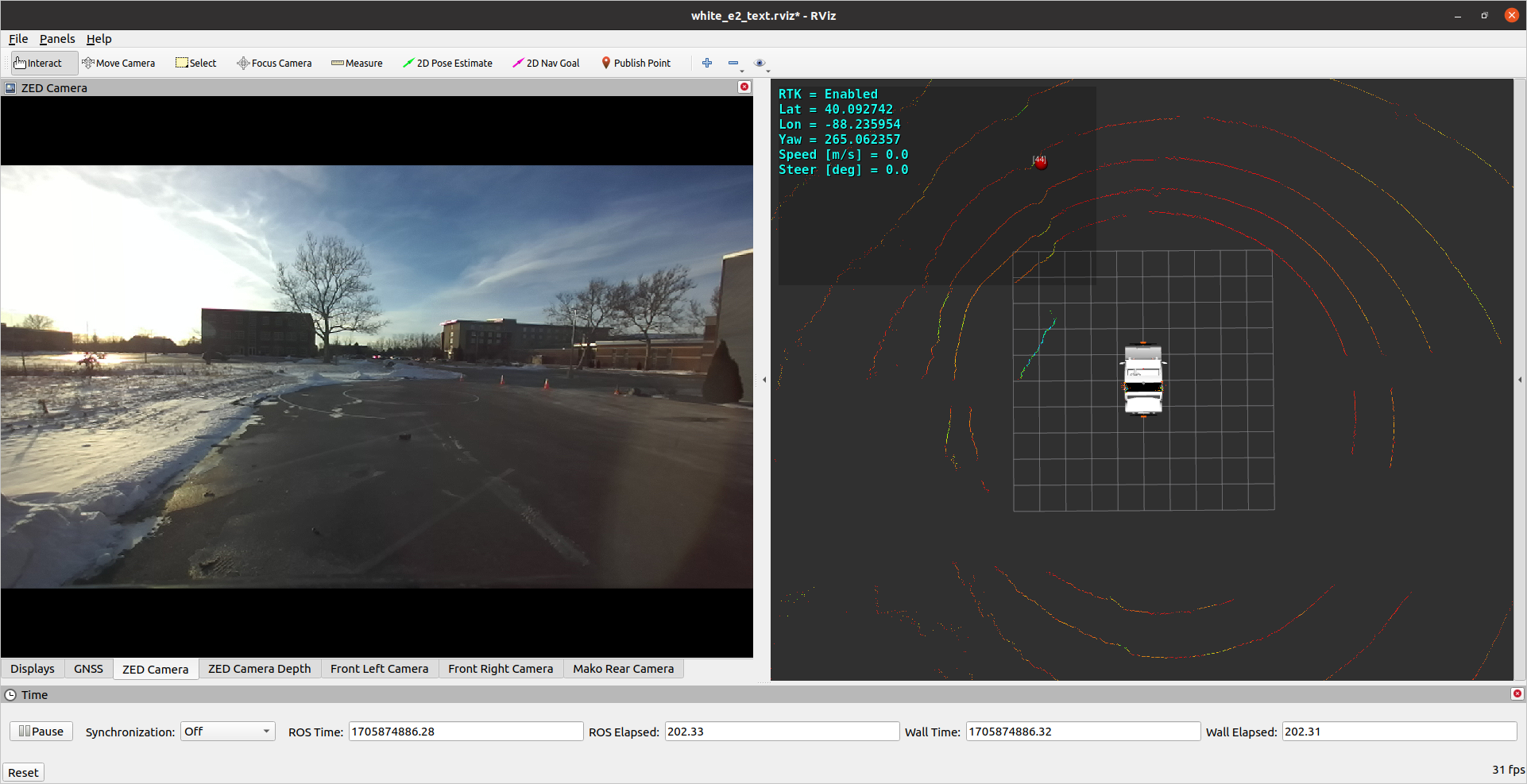
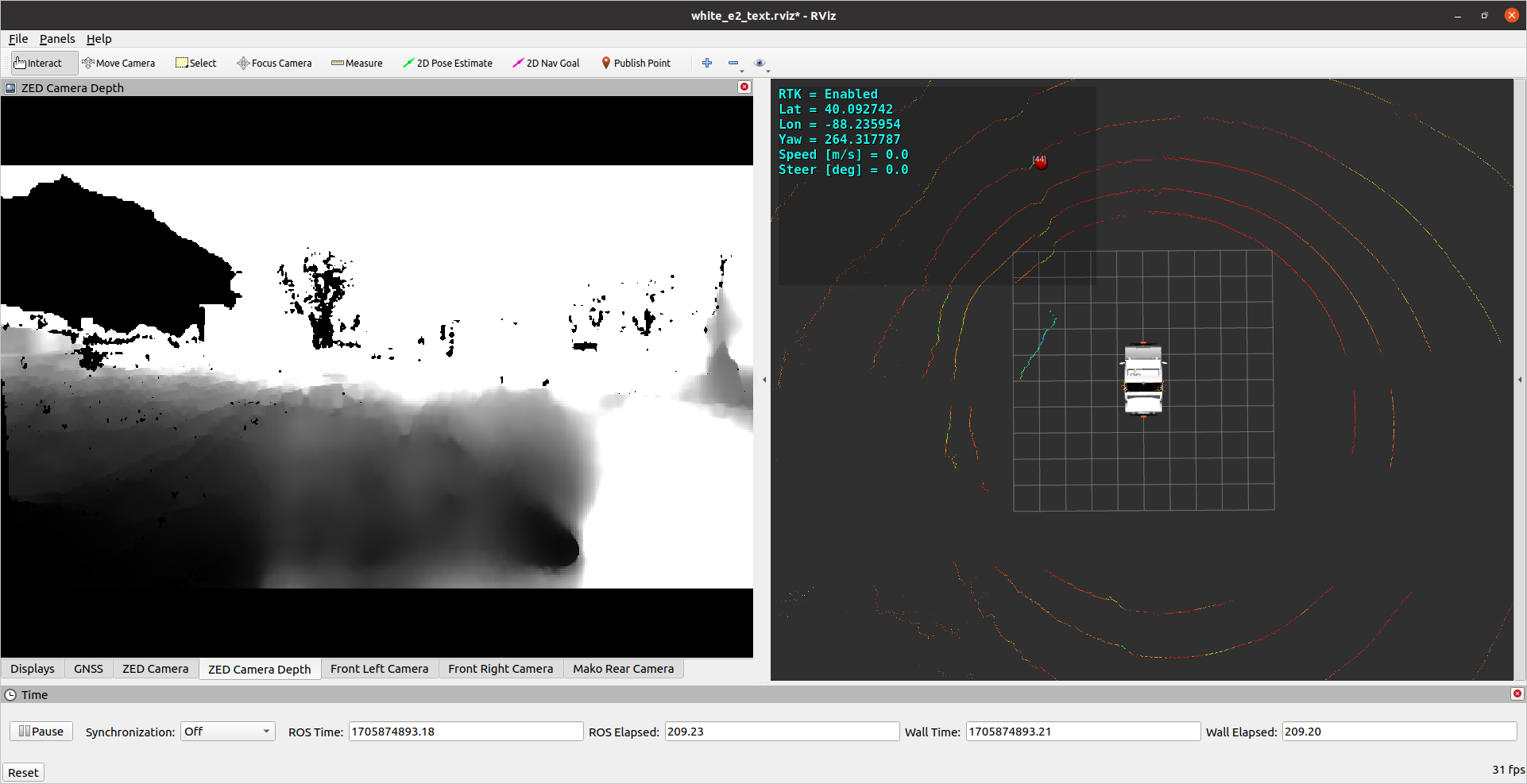
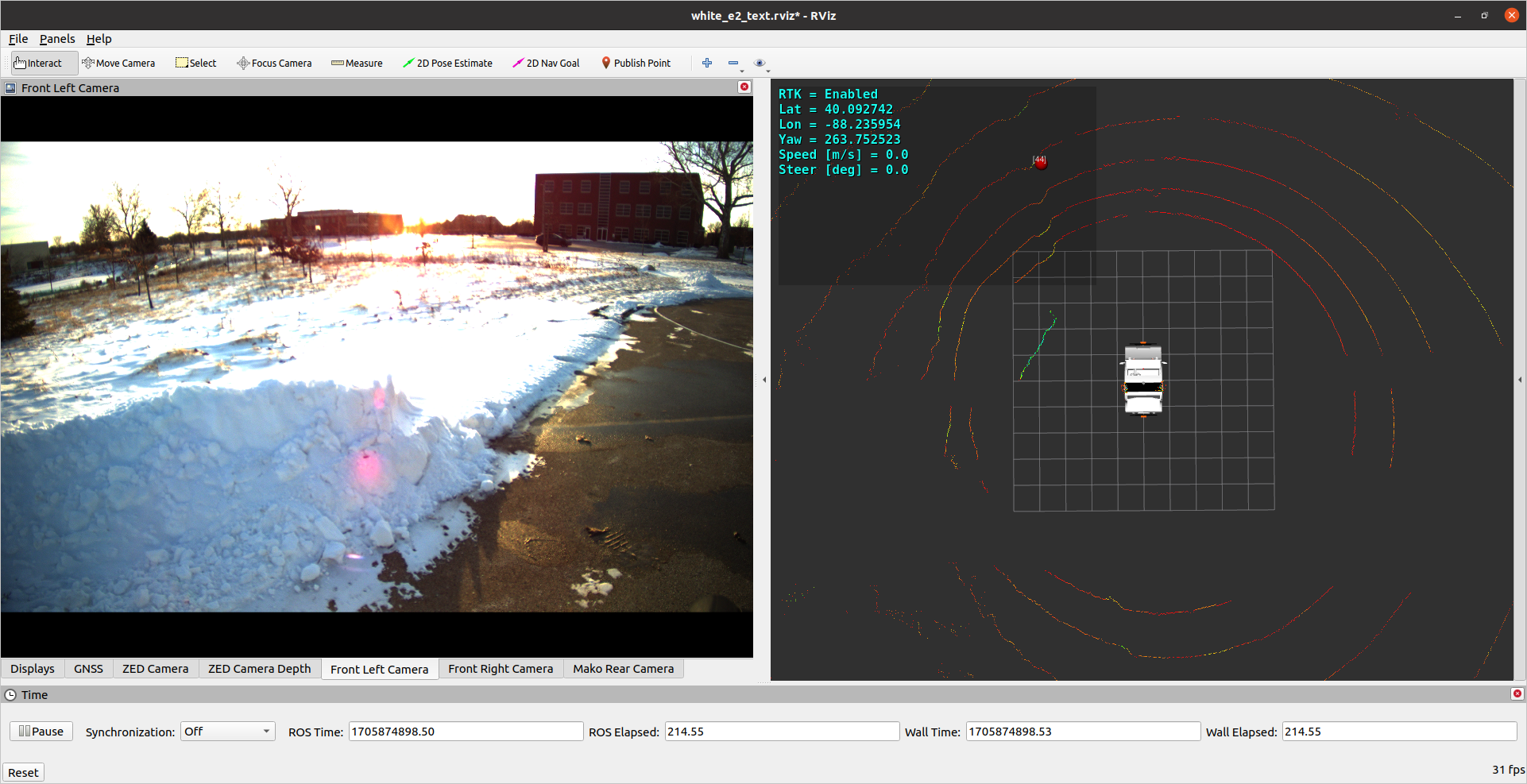
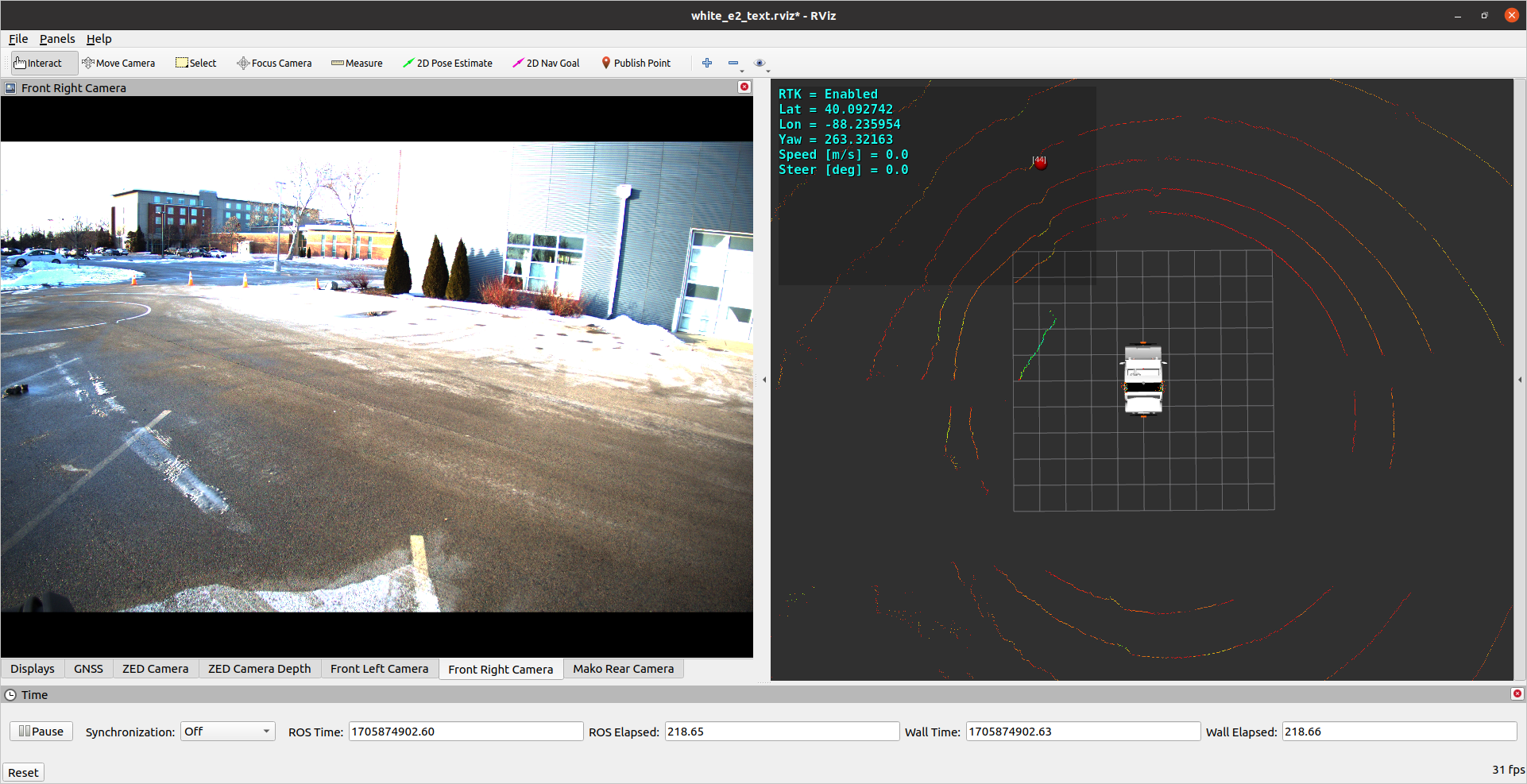
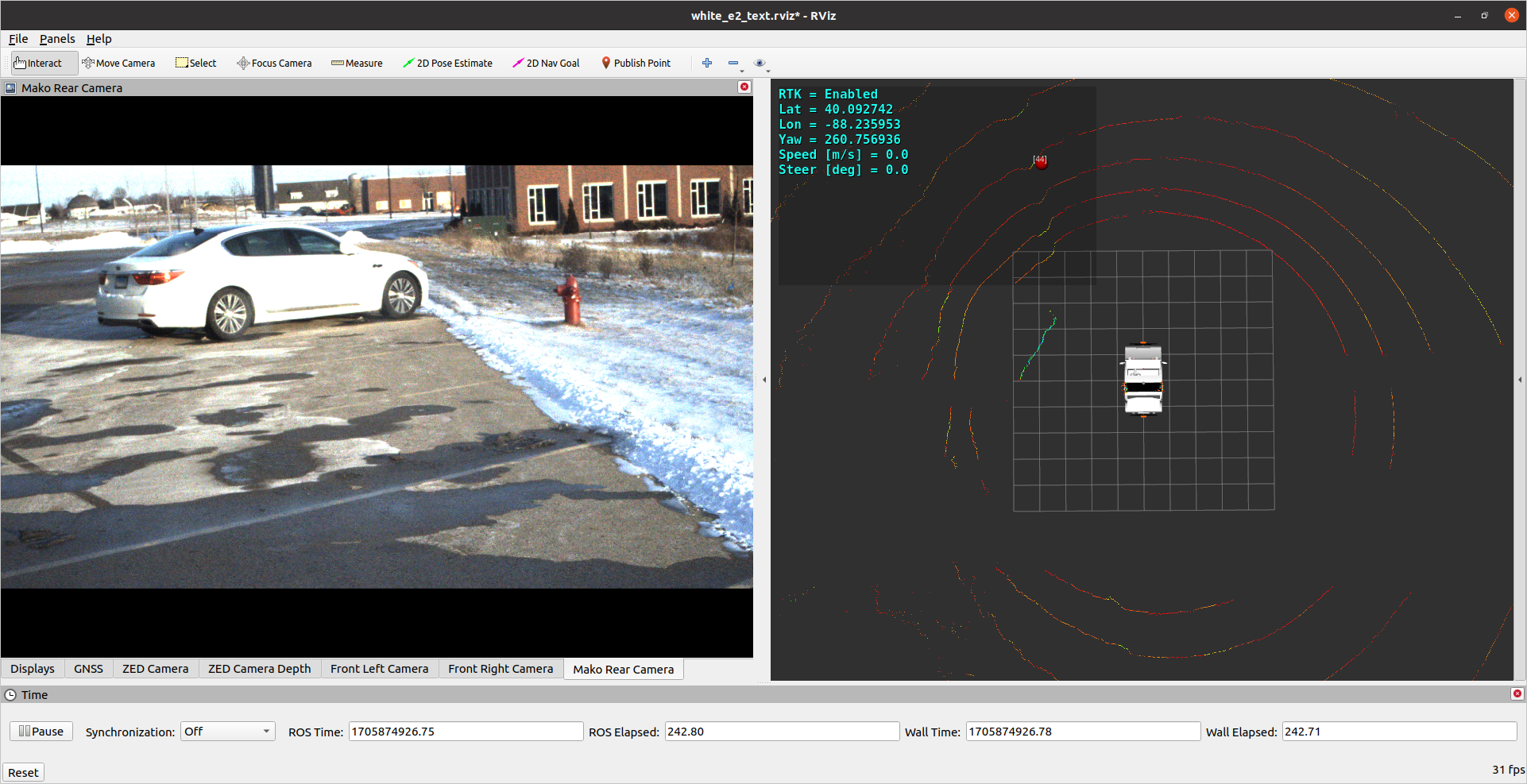
$ roslaunch basic_launch visualization.launch
$ source devel/setup.bash
$ roslaunch basic_launch dbw_joystick.launch
Click the video below.

$ source devel/setup.bash
$ roslaunch basic_launch gem_pacmod_control.launch
$ source devel/setup.bash
$ rosrun gem_gnss_control gem_gnss_tracker_stanley_rtk.py
Click the video below.

$ source devel/setup.bash
$ rosrun gem_gnss_control gem_gnss_tracker_pp.py
Click the video below (still under development).
