ROG-Map: An Efficient Robocentric Occupancy Grid Map for Large-scene and High-resolution LiDAR-based Motion Planning
Yunfan REN, Yixi Cai Fangcheng Zhu, Siqi Liang, and Fu Zhang
![]()



- Aug. 30, 2024 - Released the preview version of ROG-Map, including examples on:
- Path planning with RRT* with rrt_example.launch and A* algorithom with astar_example.launch
- Keyboard control and integration with MARSIM with marsim_example.launch
- Jun. 30, 2024 - Our paper was accepted by IEEE/RSJ IROS 204
If our repository supports your academic projects, please cite our paper. Thank you!
@article{ren2023rogmap,
title={ROG-Map: An Efficient Robocentric Occupancy Grid Map for Large-scene and High-resolution LiDAR-based Motion Planning},
author={Yunfan Ren and Yixi Cai and Fangcheng Zhu and Siqi Liang and Fu Zhang},
journal={arXiv preprint arXiv:2302.14819},
year={2023}
}
Click for the video demo.

# install dependencies
sudo apt-get install ros-noetic-rosfmt
# for MARSIM example
sudo apt-get install libglfw3-dev libglew-dev
# Eigen and soft link
sudo apt-get install libeigen3-dev
sudo ln -s /usr/include/eigen3/Eigen /usr/include/Eigen
# dw for backward cpp
sudo apt-get install libdw-dev
mkdir -p rog_ws/src && cd rog_ws/src
git clone https://github.com/hku-mars/ROG-Map.git
cd ..
catkin_make -DBUILD_TYPE=ReleaseKnown Build Issues
- Disable the conda environment with
conda deactivateto avoid linking issues. If you have trycatkin_makein conda environment, please delete thebuildanddeveland deactivate conda, and trycatkin_makeagain. - If VizCfg fails to generate, try building with
catkin_make -DCATKIN_DEVEL_PREFIX:PATH=${change-to-your-path-to-rog_ws}/devel.
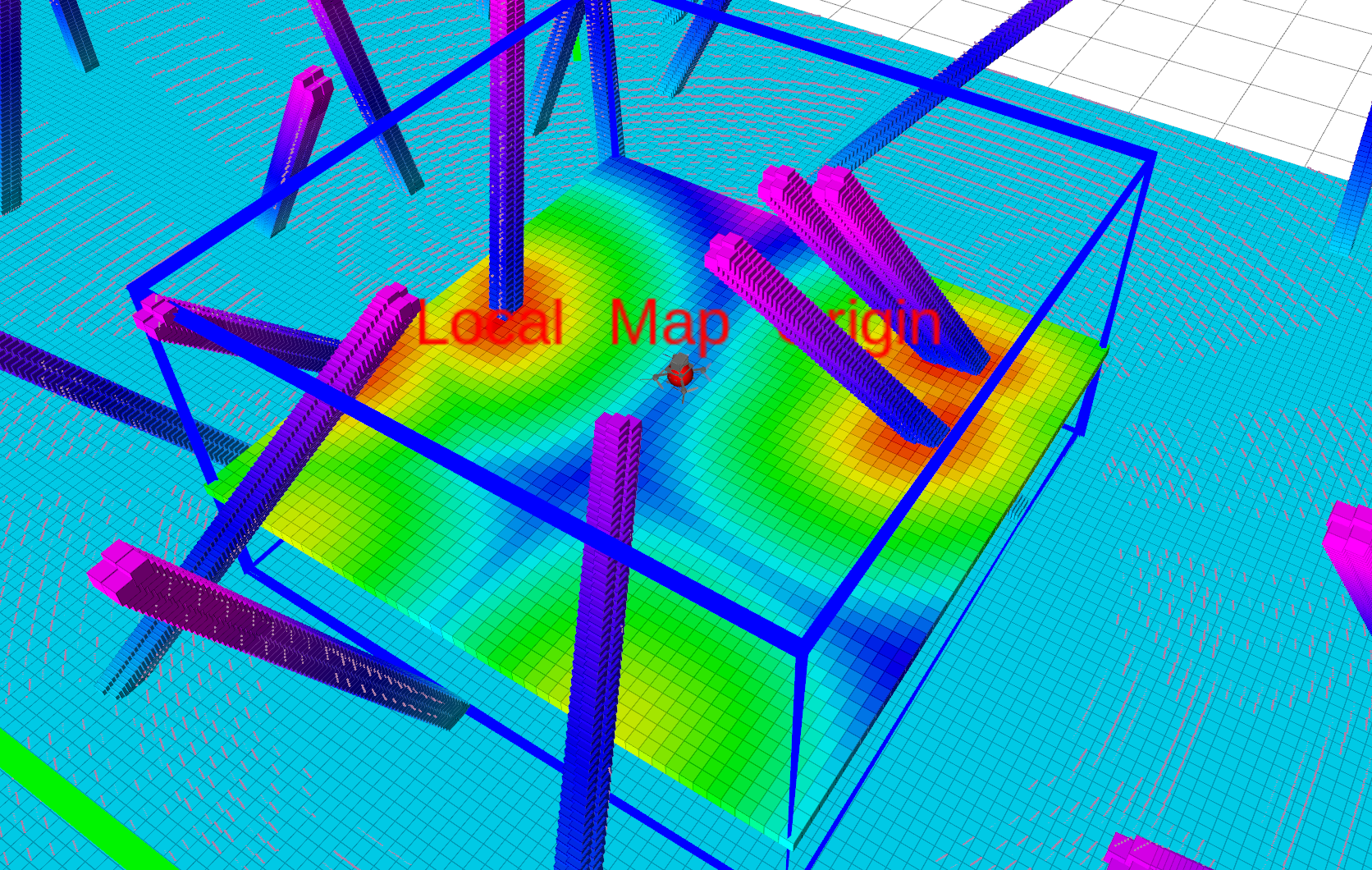
ROG-Map's three main features are zero-copy map sliding, incremental map expansion, and a counter-based multi-resolution map. All sub-maps and functionalities are built upon the SlidingMap structure. The currently open-source version includes:
- Multi-resolution inflation maps and incremental obstacle inflation:
- Example: ProbMap resolution 0.1 m (yellow) with InfMap resolution 0.2 m (gray)

- Incremental Frontier generation
- Example: Frontiers with a sensing range of 5m

-
Sliding ESDF map generation

First, launch the MARSIM environment:
source devel/setup.bash # or source devel/setup.zsh
roslaunch test_interface single_drone_os128.launchThen, launch the ROG-Map test node and the keyboard controller:
sudo chmod +x -R src
roslaunch rog_map_example marsim_example.launchAfter launching, click on the terminal running the second launch file, use the keyboard to control the drone, and observe the local sliding map:

Use W A S D on your keyboard to control the drone's velocity, press the spacebar to stop, and press Q or Ctrl + C to exit.
source devel/setup.bash # or source devel/setup.zsh
roslaunch rog_map_example astar_example.launch 
Then, you can press G to enable 3D Nav Goal in RViz and click to select a point. Each time you select two points, ROG-Map will perform path planning between them.
You can also enable the visualize_process_en param at ./examples/rog_map_example/config/astar_example.yaml to visualize the search process:
astar:
visualize_process_en: true

source devel/setup.bash # or source devel/setup.zsh
roslaunch rog_map_example rrt_example.launch 
Then, you can press G to enable 3D Nav Goal in RViz and click to select a point. Each time you select two points, ROG-Map will perform path planning between them.
You can also enable the visualize_process_en param at ./examples/rog_map_example/config/rrt_example.yaml to visualize the sampling process:
rrt_star:
visualize_process_en: true

- Add example for safe flight corridor generation.
- Add example for trajectory optimization.
To use ROG-Map, refer to the rog_map_example package. Here’s a basic guide:
- Copy the
rog_mappackage to your workspace and add the following dependencies in yourpackage.xml:
<build_depend>rog_map</build_depend>
<exec_depend>rog_map</exec_depend>- Include
rog_mapin yourCMakeLists.txt:
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
pcl_ros
geometry_msgs
nav_msgs
rog_map # here!
)- Include
rog_mapin your source file as demonstrated in marsim_example_node.cpp
#include "rog_map/rog_map.h"
int main(int argc, char** argv) {
ros::init(argc, argv, "rm_node");
ros::NodeHandle nh("~");
pcl::console::setVerbosityLevel(pcl::console::L_ALWAYS);
/* 1. Creat a ROGMap ptr*/
rog_map::ROGMap::Ptr rog_map_ptr = std::make_shared<rog_map::ROGMap>(nh);
/* Publisher and subcriber */
ros::AsyncSpinner spinner(0);
spinner.start();
ros::Duration(1.0).sleep();
ros::waitForShutdown();
return 0;
}ROG-Mapautomatically reads parameters from the ROS parameter server. Ensure you load parameters in your launch file:
<launch>
<node name="rm_node" pkg="rog_map_example" type="marsim_example_node" output="log">
<!-- remember to load the parameters like here!! -->
<rosparam command="load" file="$(find rog_map_example)/config/marsim_example.yaml"/>
</node>
<node name="keyboard_control" pkg="rog_map_example" type="keyboard_control.py" output="screen">
</node>
</launch>- Update ROG-Map by either:
- Using ROS topics:
- Specify
odomandpoint cloudtopic name and ROG-Map will automatically update.
- Specify
rog_map:
ros_callback:
enable: true
cloud_topic: "/cloud_registered"
odom_topic: "/lidar_slam/odom"
odom_timeout: 2.0- Manually updating: Disable ROS topic updates in the configuration YAML:
rog_map:
ros_callback:
enable: false
cloud_topic: "/cloud_registered"
odom_topic: "/lidar_slam/odom"
odom_timeout: 2.0
Then actively update ROG-Map by calling:
void ROGMap::updateMap(const PointCloud& cloud, const Pose& pose);
We provide preset parameter files in ./examples/rog_map_example/config for your convenience. You can select and modify them as needed:
- No raycasting, only occupied and inflated maps: no_raycast.yaml
- Basic occupancy grid map with frontier generation and ESDF update disabled: pure_ogm.yaml
- ...
Special thanks to ZJU-FAST-Lab and HKUST Aerial Robotics Group for their great works.
- The RRT* example was adapted from ZJU-FAST-Lab's sampling-based path finding.
- Parts of ROG-Map and the A* example were inspired by Ego-Planner.
- The ESDF module was modified from Fast-Planner, with the addition of local map sliding functionality.