This page shown more visualization results of our related paper ''R3LIVE: A Robust, Real-time, RGB-colored, LiDAR-Inertial-Visual tightly-coupled state Estimation and mapping package'' (arxiv, github), with providing the download the offline maps of our experiment result:
The offline pointcloud maps (hkust_campus_pointcloud.pcd) of our Experiment-2 can be download on our google-drive:
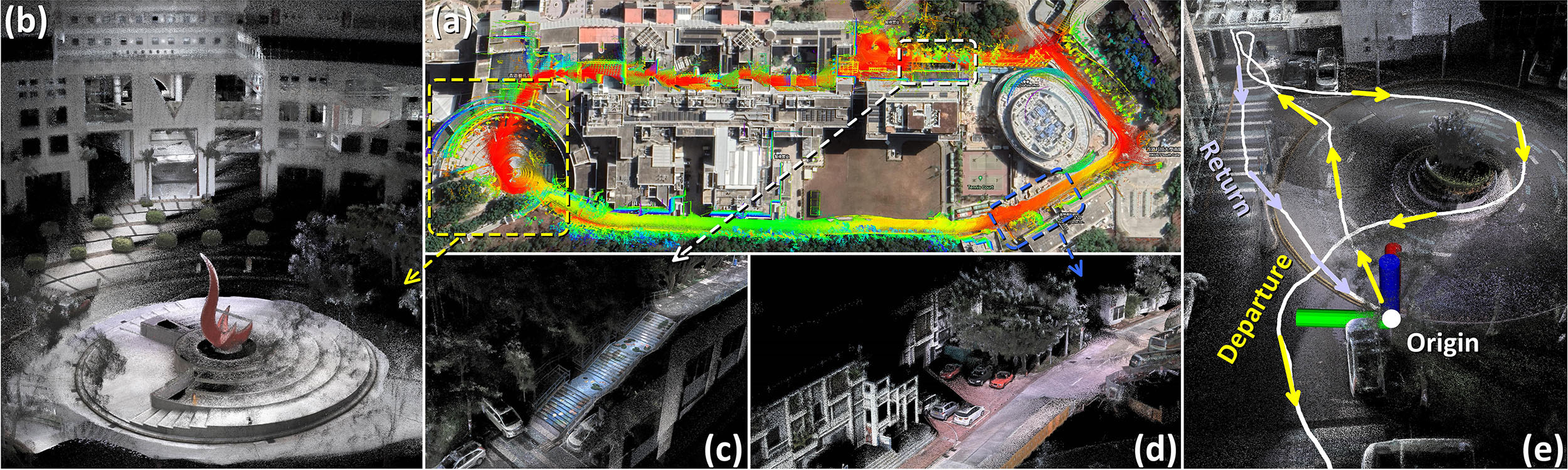 Our Experiment-2.
Our Experiment-2.
More over, we also provide the offline pointcloud maps (hku_demo_pointcloud.pcd) and mesh (hku_demo_mesh.ply) of HKU campus(see our relative video):
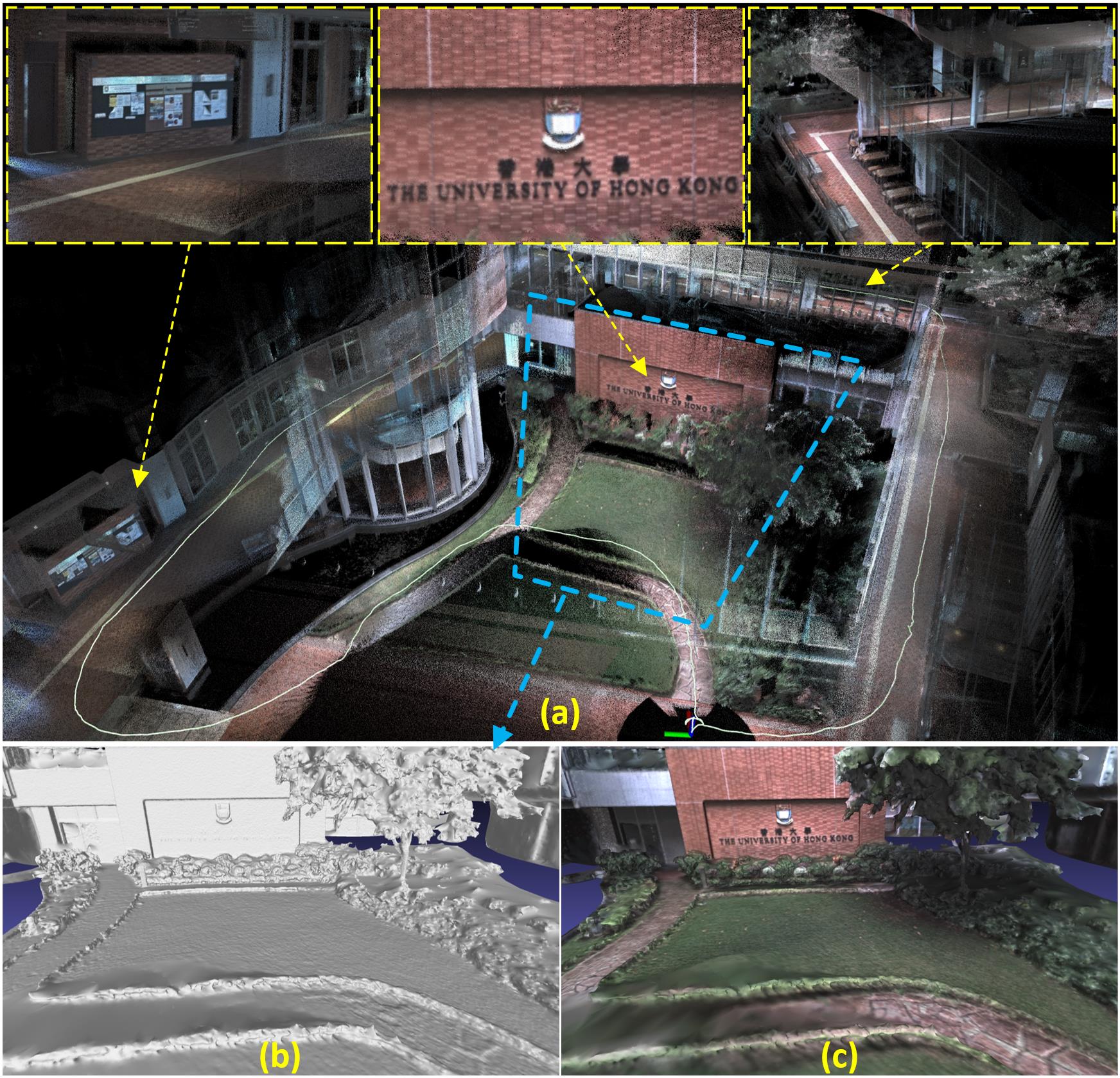 Build The University of Hong Kong with R3LIVE.
Build The University of Hong Kong with R3LIVE.
For our offline pointcloud maps (with suffix *.pcd), you can open it with pcl_viewer, CloudCompare, and etc:
sudo apt-get install pcl-tools
pcl_viewer YOUR_DOWNLOADED_MAP.ply
For our offline mesh file (with suffix *.ply), you can open it with meshlab, CloudCompare, and etc:
sudo apt-get install meshlab
pcl_viewer YOUR_DOWNLOADED_MAP.ply