6D Object Pose Estimation (D6.4 ILIAD)
This contains a brief guide how to install / run the ROS-based simplified Object-RPE developed at ORU in D6.4 ILIAD project.

The tools require full ROS installation. The installation assumes you have Ubuntu 16.04 LTS [ROS Kinetic]
- Clone the repository and switch to iliad branch
$ https://github.com/hoangcuongbk80/Object-RPE.git $ git checkout iliad
- ROS
$ cd ~/catkin_ws $ catkin_make install
- Segmentation here
- 3D mapping here
- 6D object pose estimation here
-
Download data folder here and copy to ~/catkin_ws/src/Object-RPE
-
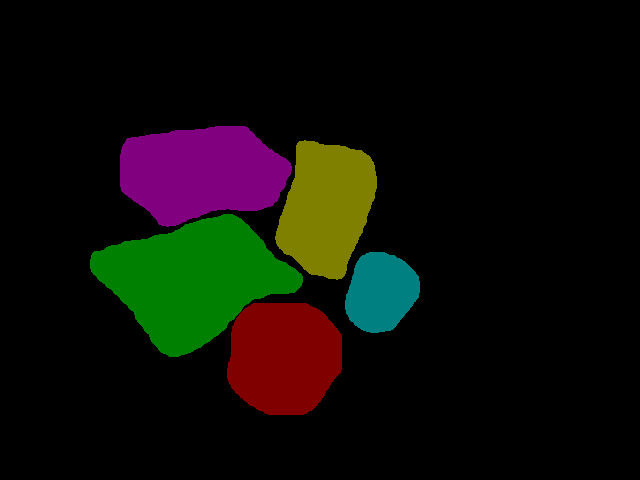
To test segmenation module:
$ cd ~/catkin_ws/src/Object_RPE/Mask-RCNN/samples/warehouse $ python3 eval.py
It will read rgb and ground-truth images from /rgb and gt/ folders in .../Object-RPE/data then save results (mask and accuracy.txt file) into .../Object-RPE/data/mask

-
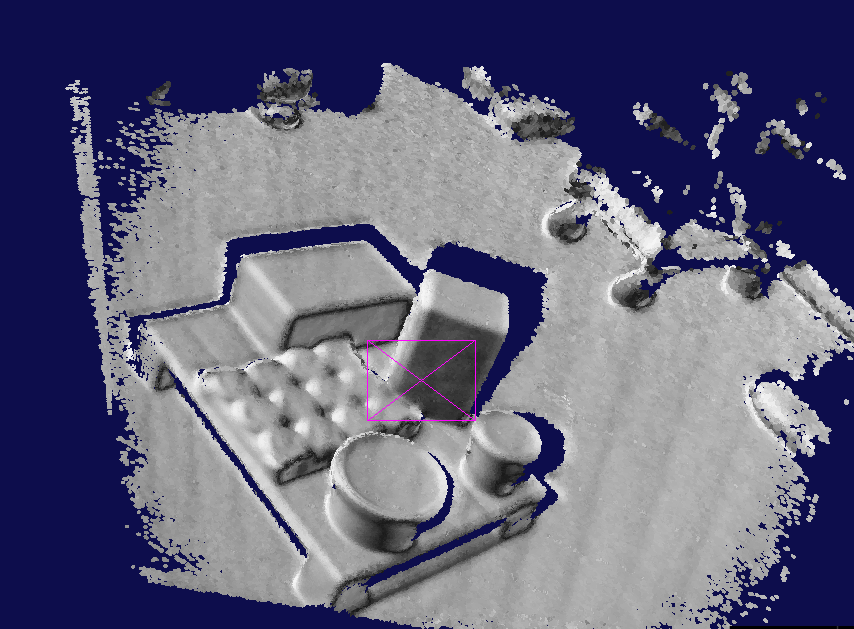
To test 3D mapping module:
$ cd ~/catkin_ws/src/Object-RPE/obj_pose_est/mapping/app $ ./obj_pose_est/mapping/app/build/mapping -l data/ 100
-
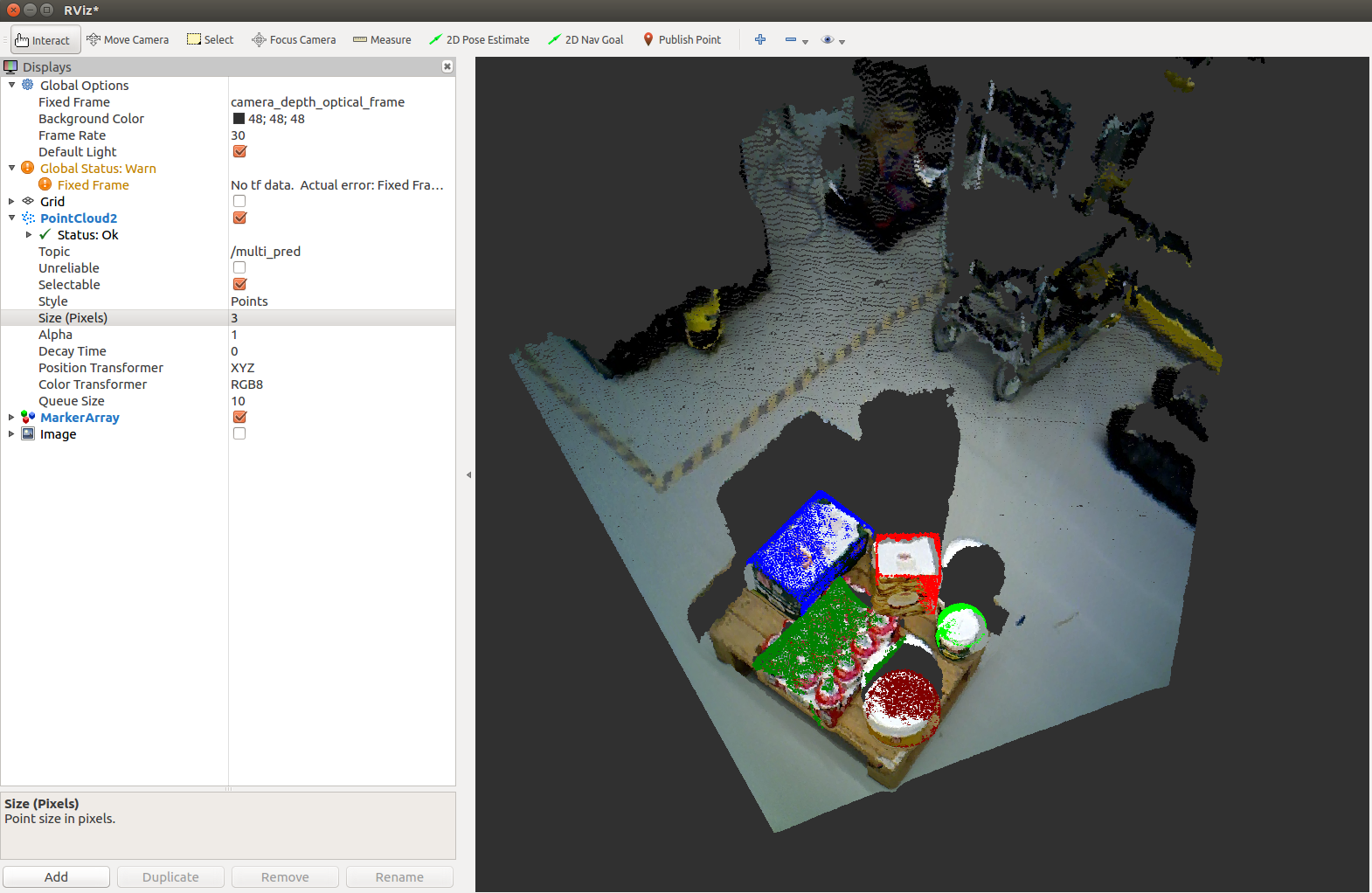
To test pose estimation module (Video):
$ roscore
In an other terminal:
$ rosrun obj_pose_est ObjectRPE_srv.py
In an other terminal:
$ roslaunch obj_pose_est launch_object_rpe.launch




$ roscore
$ rosrun obj_pose_est ObjectRPE_srv.py
$ roslaunch obj_pose_est launch_rpe_cam.launch
$ roslaunch openni2_launch openni2.launch